



品牌
经销商厂商性质
上海市所在地
玉林西门子S7-200代理商 玉林西门子S7-200代理商
浔之漫智控技术有限公司 上海诗慕自动化设备有限公司
本公司销售西门子自动化产品,*,质量保证,价格优势
西门子PLC,西门子触摸屏,西门子数控系统,西门子软启动,西门子以太网
西门子电机,西门子变频器,西门子直流调速器,西门子电线电缆
我公司大量现货供应,价格优势,*,德国*
采购西门子产品,均可质保一年、假一罚十、以满足客户的需求为宗旨 、 以诚为本、精益求精 |
6se70 伺服控制器(MC)集成了定位功能,要实现定位控制可以有三种方法:直接设定位置控制器,基本定位功能(自由功能块),F01定位功能。
1 基本定位功能概述
基本定位功能是MC伺服控制器在自由功能块中固化的功能,可以免费使用,实现运动控制系统中的一些简单定位功能,如:homing ,position ,setup 功能。可以选择旋转轴和线性轴,设定定位限位开关等功能,能满足大部分定位应用的要求。
功能图在说明书的789a,789b,789c 部分,如图1所示。
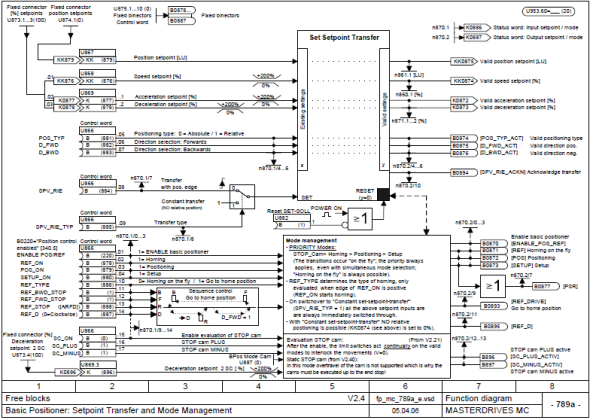
图1
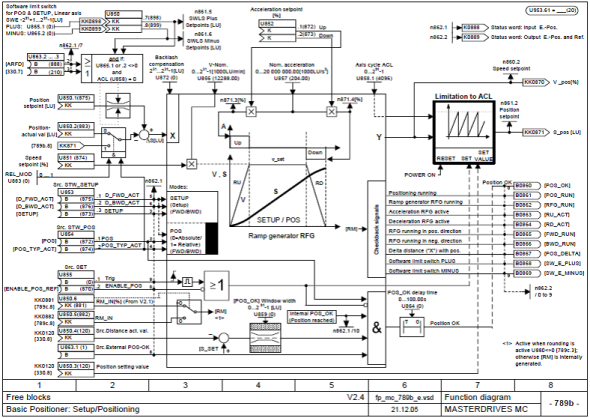
图2
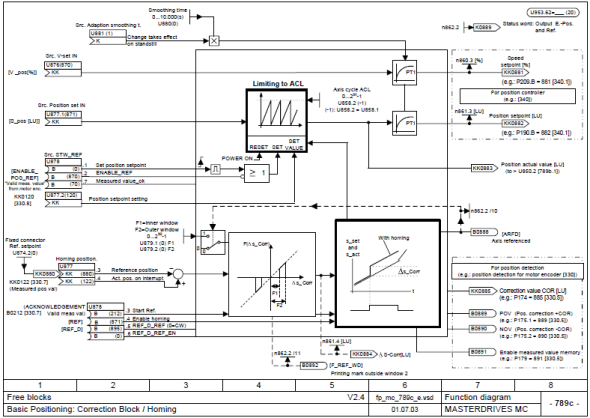
图3
2 启用基本定位功能
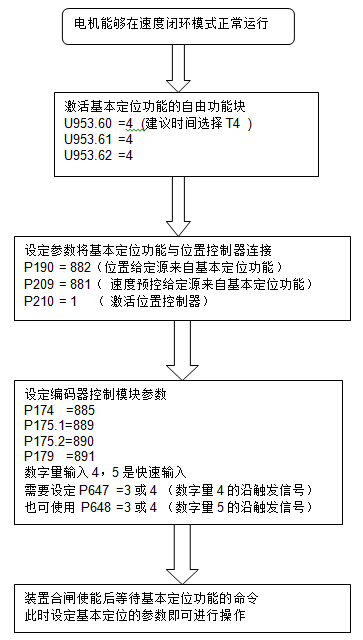
首先设置MC 装置的参数,使装置能在速度闭环模式驱动运行(参见调试手册P060=3或P060=5的调试步骤 ),然后设定参数激活基本定位功能,流程如下:
西门子伺服驱动器代理商
图4
3 基本定位功能的参数设定
U856 ---速度的标称值,即100%转速对应的 LU, 通常设定为额定转速,单位1000LU/min
例如 电机额定转速3000rpm , 编码器脉冲4096/rev,则U856=4096*3000/1000=12288
U857---加速度标称值
U858---旋转轴线性轴选择
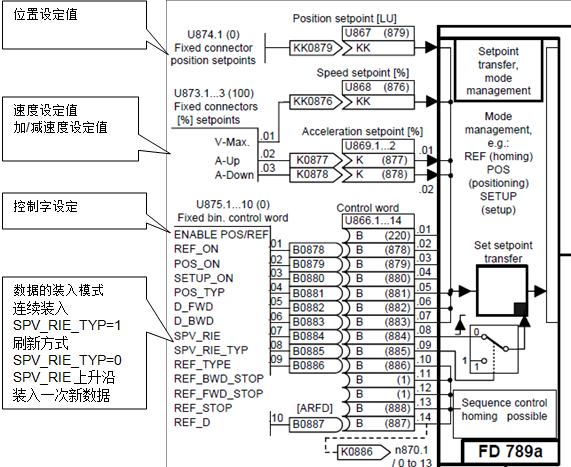
图5
装置合闸使能后,进入o011 状态,等待速度,此时对控制字进行设定可以实现工作模式。首先ENABLE POS/REF,基本定位功能使能激活(B0220连接量使能),然后可以进行各种工作模式的操作。
3.1 Homing mode (回零模式)
Homing mode (回零点) 包含两种方式Homing on the fly模式和Homing movement模式。
3.1.1 Homing on the fly模式
? Homing 模式使能REF_ON =1 ;
? 模式选择REF_TYPE=0 ;
? 通过数字量输入4或5来触发动作,也可与SETUP或 POSITION模式一同使用。
3.1.2 Homing movement 模式
? 模式选择REF_TYPE=1 ;
? 选择开关动作有效时的运行方向,REF_D=0 正向运行过程中,开关动作有效
REF_D=1 反向向运行过程中,开关动作有效
? 设定启动时的运行方向,正向D_FWD=1或反向B_FWD=1
? 为正向限位D_FWD_STOP 和反向限位B_FWD_STOP分配两个数字量开关,高电平表示到达限位
? Homing 模式使能REF_ON 上升沿激活动作,开始运行 ;
工作时序如下(图6):
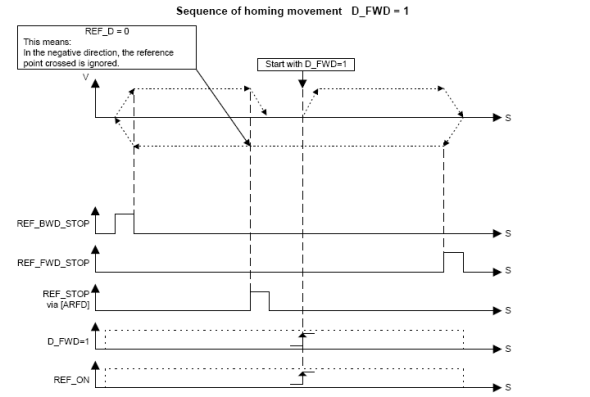
图6
3.2 Set up mode (速度模式)
? 使能SETUP_ON=1
? 设定运行方向D_FWD或B_FWD上升沿触发运行动作
? 运行速度设定U868
? 也可以在设定好方向后SETUP_ON上升沿触发动作
工作时序如下(图7)
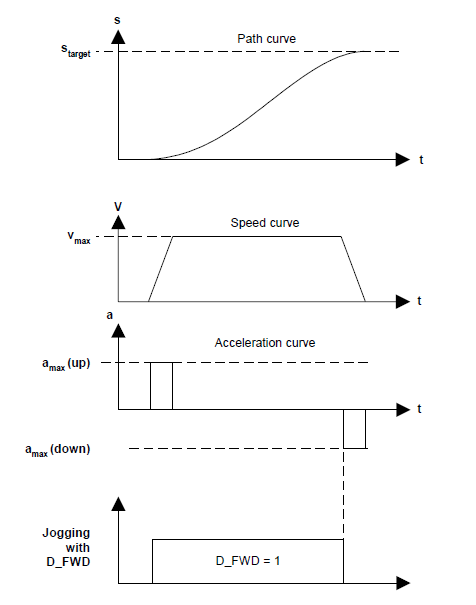
图7
3.3 Position mode (定位模式)
Position 模式包含两种定位方式,对定位方式和相对定位方式。
3.3.1 Absolute position (对定位方式)
? 使能POS_ON=1
? 使能POS_TYP=0
? D_FWD=1正向运行到设定位置
B_FWD=1 反向运行到设定位置
D_FWD=0,B_FWD=0zui短路径运行到设定位置
? 位置设定U867,速度U868
3.3.2 Relative position (相对定位方式)
1.1 电子齿轮比的作用
电子齿轮比就是对伺服接收到的上位机脉冲频率进行放大或者缩小。其中一个参数为分子,为电机编码器的分辨率;一个为分母,为电机旋转一圈所需要的脉冲数。如果分子大于分母就是放大,如果分子小于分母就是缩小。
在 实际应用中,连接不同的机械结构,移动zui小单位量所需的电机转动量是不同的,例如:同样一个伺服电机,如果连接了一个螺距为10mm的丝杠,那么电机转一 圈机械移动10mm,每移动0.001mm就需要电机转1/10000圈;而如果连接螺距为5mm的丝杠,每移动0.001mm需要电机转1/5000 圈。而电机编码器的分辨率是相同的,因此可以通过设置电子齿轮比来使电机脉冲数和机械zui小移动量相匹配,这就是电子齿轮比的作用。 1.2 相关概念介绍
(1)编码器分辨率:伺服电机轴旋转编码器反馈脉冲数。
V90的伺服电机有增量编码器和对值编码器,其分辨率如下图:
图01. V90伺服电机编码器的分辨率
(2)每转脉冲数:丝杠转动一圈所需脉冲数。
(3)zui小长度单位(LU):上位机发出一个脉冲时,丝杠移动的直线距离或旋转轴转动的度数,也是控制系统所能控制的zui小距离。这个值越小,经各种补偿后越容易得到更高的加工精度和表面质量。当进给速度满足要求的情况下,可以设定较小的长度单位。也称作“脉冲当量”。




