企业动态2024/11/29 11:29:46
深入解析雷尼绍工业机器人解决方案
来源:雷尼绍Renishaw2024/1/1 14:25:0098
导读
深入解析雷尼绍工业机器人解决方案。
在科技飞速发展的今天,工业机器人已经成为许多企业生产线上的得力助手。那么,什么是工业机器人呢?当我们谈论到机器人时,大家可能首先想到的是电影中的类似人型的机器人。然而,在现实生活中,真正的工业机器人与我们想象中的形态有很大差别。
工业机器人的市场现状
工业机器人也被称为工业机械臂,它们可以在工厂生产线上执行重复性、高精度和高效率的任务。与传统的单一功能设备相比,工业机器人具有更强的适应性和灵活性。它们可以根据需要随时调整程序,以满足不同生产环境和需求。按照不同的设计结构,工业机器人可以被分为 6轴机器人,4轴机器人,Scara机器人和Delta机器人等。此外,随着5G、虚拟现实等新技术的不断发展,工业机器人的应用场景将会越来越丰富,它们将在更多领域发挥巨大的价值,使其在生产过程中变得越来越智能。
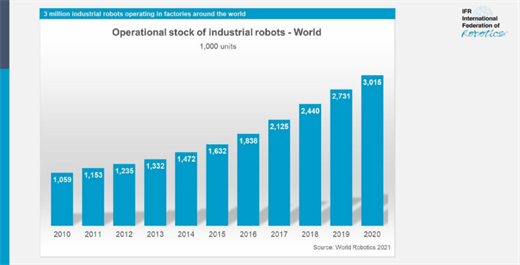
全球工业机器人保有量超300万台,以15%的速度逐年增长。其中使用工业机器人最多的国家为中国,日本,美国,韩国和德国。这5个国家的机器人占有率约为75%。
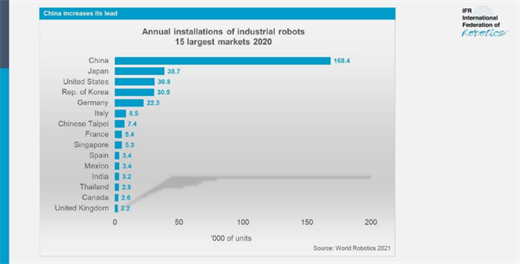
中国的工业机器人保有量约为全球的50%,亚洲的70%。就2020年,中国的工业机器人增长约17万台。
以上数据来源: IFR World Robotics 2021公开信息
工业机器人自动化的挑战
在工业机器人使用数量如此庞大的情况下,衍生出了许多不同的工业机器人应用场景,随着应用的增加,对工业机器人自动化的也开始面临诸多挑战。
1. 在调试阶段,如何快速地进行机器人设置和机器人工作性能验证?
2. 如果出现机器人碰撞后,如何快速恢复工站生产?
3. 如何追踪生产期间机器人的性能变化?
4. 如何将离线的机器人轨迹程序导入工站,尽可能少的修改轨迹?
雷尼绍工业自动化解决方案
如果您的工业机器人也遇到以上挑战,雷尼绍公司将已有的成熟产品引入机器人自动化中,并辅以超过50年的计量学方法和经验,以此应对机器人自动化中的挑战,为您提供工业机器人自动化解决方案。
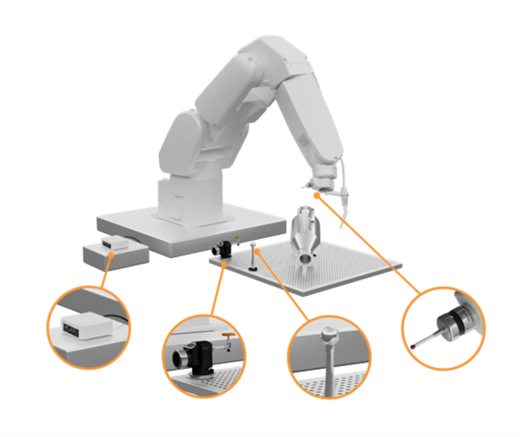
雷尼绍已推出了2款工业自动化产品:RCS L-90 / RCS T-90 球杆仪系列和RCS P-series 测头系列。
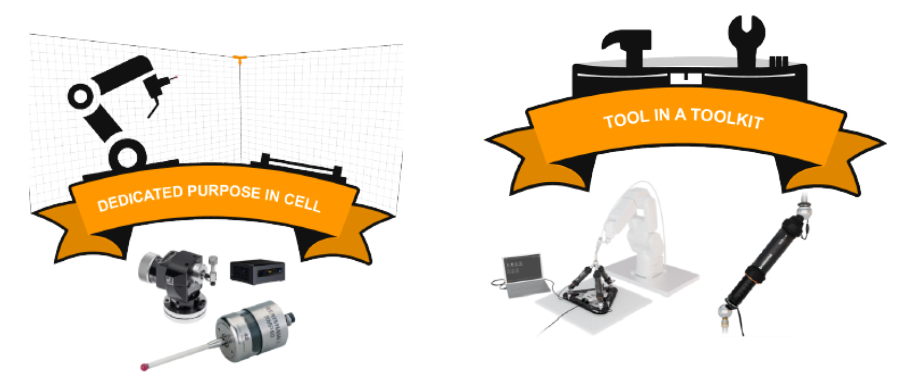
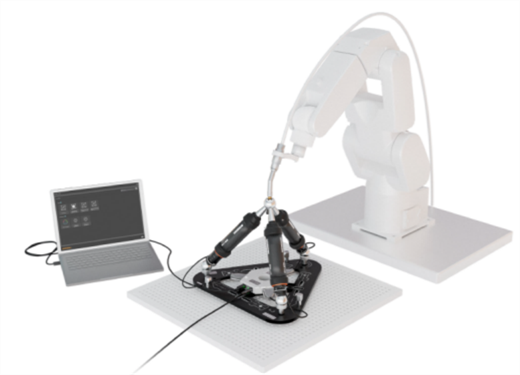
RCS L-90 / RCS T-90 系列
RCS L-90 / RCS T-90球杆仪系列可以成为机器人工程师的必备工具,主要用于对机器人工站进行设置,诊断和服务。球杆仪是一种用于测量两端球心之间距离的设备,行程为90mm。
RCS L-90系列

RCS L-90设置功能:可以快速的生成机器人工具中心点(TCP),工件坐标系。
传统的机器人TCP设置方法是:使用2个针尖,针尖和针尖对上来确定点位,并在机器人中记录3到多个点,从而计算机器人的TCP。这种方法产生的TCP精度,往往依赖于机器人工程师的能力以及当时的状态,存在一定的人为误差。
使用RCS L-90来进行TCP设置,仅仅需要将球杆仪架设好,根据可视化界面的指示旋转机器人, 记录机器人姿态。生成的机器人TCP不取决于工程师,而是机器人整体精度的体现, 具有极高的复现性,不同的人员操作均可获得相同TCP。
RCS L-90 诊断功能:可以快速测量机器人TCP的精度,机器人某方向的重复性,单一轴的重复性,机器人在空间中的轨迹精度。可方便快速的获取机器人的工作性能,并生成报告,定期追踪机器人的性能变化,方便定期维护。
RCS T-90系列
RCS T-90通过多个不同的机器人位姿,计算机器人2-5轴的关节偏移量,修正关节偏移量在一定程度上可以提高机器人的表现性能,延长机器人使用周期。
RCS P 系列
RCS P-series测头系列一般永久安装在工站中,用于自动地进行工具坐标系及工件坐标系标定,恢复机器人工作轨迹。
P系列由雷尼绍测头或对刀仪组成,并由1个机器人处理单元(RPU)负责算法运算。
根据雷尼绍在三坐标及机床行业的多年经验,将计量学的原理运用到机器人行业,同时辅以雷尼绍MTP产品线的高精度测头测针,实现了机器人TCP和工件坐标系的自动校正,可以在工站中实时进行更新,从而使生产更显智能。
版权与免责声明:凡本网注明“来源:兴旺宝”的所有作品,均为浙江兴旺宝明通网络有限公司-兴旺宝合法拥有版 权或有权使用的作品,未经本网授权不得转载、摘编或利用其它方式使用上述作品。已经本网授权使用作品的,应在授权范围内使用,并注明“来源:兴旺宝”。违反上述声明者,本网将追究其相关法律责任。 本网转载并注明自其它来源(非兴旺宝)的作品,目的在于传递更多信息,并不代表本网赞同其观点或和对其真实性负责,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品第一来源,并自负版权等法律责任。 如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
展开全部热门评论
相关新闻
-

-

格力智能装备亮相中国工业工程年会:新质生产力赋能智能制造新实践
企业动态2024/11/27 14:23:31 -

需求量加速增长!2024年前10月我国工业机器人产量已突破46万套
行业动态2024/11/16 14:11:25 -

【行业数据】2024年前三季度机械工业主要分行业实现平稳运行
行业动态2024/11/2 8:51:53 -
 企业动态2024/10/25 8:41:10
企业动态2024/10/25 8:41:10