




品牌
代理商厂商性质
上海市所在地

西门子808数控系统
面议西门子V90信号电缆6FX3002-2CT20-1AF0
面议
泰州西门子V90伺服电机代理商
面议
西门子低压变频器MM440
面议西门子低压变频器MM440
面议
西门子V20低压变频器6SL3210-5BB11-2UV1
面议西门子V20低压变频器6SL3210-5BB11-2UV1
面议
西门子V20 1AC230V 1,1KW变频器
面议西门子V20 1AC230V 1,1KW变频器
面议
西门子V20变频器6SL3210-5BE23-0UV0
面议西门子V20变频器6SL3210-5BE23-0UV0
面议
西门子V20变频器6SL3210-5BB15-5UV0
面议西安西门子伺服电机代理商 西安西门子伺服电机代理商
上海腾希电气技术有限公司在经营活动中精益求精,具备如下业务优势:
SIEMENS 可编程控制器和电源产品
1、SIMATIC S7系列PLC:S7-200/S7-200SMART/S7-1200/S7-300/S7-400/ET200/S7-1500
2、逻辑控制模块 LOGO!230RC、230RCO、230RCL、24RC、24RCL等
3、SITOP系列直流电源 24V DC 1.3A、2.5A、3A、5A、10A、20A、40A
SIEMENS HMI触摸屏:TD200/TD400C/SMART700IE/SMART1000IE/TP700/TP1200/TP900/TP1500
SIEMENS 交、直流传动装置
1、 交流变频器及伺服:MM420/430/440、G120、G110、V10、V20、V60、V70、V80、V90及6SE70系列(FC、VC、SC)
2、全数字直流调速装置 6RA23、6RA24、6RA28、6RA70、6RA80系列
SIEMENS 数控伺服
1、数控系统:840D、802S/C、802SL、828D、801D :6FC5210,6FC6247,6FC5357,6FC5211,6FC5200,6FC5510
2、伺服系统: 611A/U/D:6SN1123,6SN1145,6SN1146,6SN1118,6SN1110,6SN1124,6SN1125,6SN1128
3、伺服系统:S120: 6SL304、6SL3210、6SL3130、6SL3055、6SL3054
SIEMENS/TENSEY
西门子自动化与驱动产品合作伙伴
上海腾希电气技术有限公司
:张波 :转815
转811 :
公司:www.tensey。。com
公司地址:上海市松江区文城路358弄嘉和写字楼202
S7-1500 连接 SINAMICS V90 实 现位置控制
发表时间:2017-11-30 09:58
1 摘要
本文主要介绍了如何使用 S7-1500PLC 连接 SINAMICS V90 伺服系统实现位置闭环控制。其中对 S7-1500 相关模块的组态,工艺对象的组态,V90 的相关参
数设置以及相关的接线作了简要介绍。
2 简介
2.1 S7-1500 运动控制功能
S7-1500 运动控制功能支持旋转轴、定位轴、同步轴和外部编码器等工艺对象。并拥有轴控制面板以及全面的在线和诊断功能有助于轻松完成驱动装置的调试和
优化工作。
S7-1500 支持多种连接方式。可以使用 PROFIBUS DP 和 PROFINET IO 连接驱动装置和编码器,也可以使用模拟量输出模块(AQ)连接带模拟设定值接口
的驱动装置并通过工艺模块(TM),读出编码器的信息。本文中所涉及的例子就是使用第二种方式。
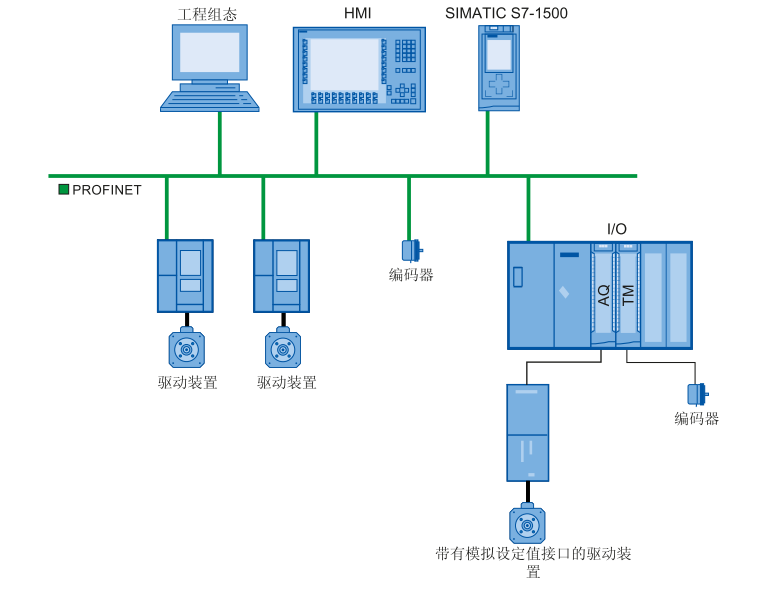
图 2-1 连接方式示意
2.2 SINAMICS V90
SINAMICS V90 是西门子推出的一款小型、高效便捷的伺服系统,可以实现位置控制、速度控制和扭矩控制。
使用 V90 的速度控制功能可以与 S7-1500 运动控制功能配合使用,接收 S7-1500 模拟量模块发出的+-10V 模拟量信号做为速度给定,并通过 PTO 功能反馈
位置信号给 S7-1500,在 S7-1500PLC 中实现闭环位置控制。
3 应用项目配置
3.1 S7-1500 组态
3.1.1 组态硬件配置
由于需要模拟量输出信号来控制速度给定,并接收来自 V90 的脉冲反馈信号,所以 S7-1500 系统中至少要配置 1 块模拟量输出模块和 1 块高速计数模块,考
虑到 V90 给出的位置反馈信号是 5V 差分信号,S7-1500 系统中也要配置能够接收 5V 差分信号的高速计数模块。还需要 1 块数字量输出模块来为 V90 提供使能
信号。
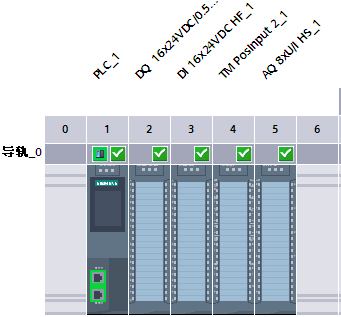
图 3-1 S7-1500 模块配置
| 模块名称 | 订货号 | 固件版本 |
| CPU 1513-1 PN | 6ES7 513-1AL00-0AB0 | FW V1.5 |
| DQ 16x24VDC/0.5A ST | 6ES7 522-1BH00-0AB0 | FW V2.0 |
| DI 16x24VDC HF | 6ES7 521-1BH00-0AB0 | FW V2.0 |
| AQ 8xU/I HS | 6ES7 532-5HF00-0AB0 | FW V2.0 |
| TM PosInput 2 | 6ES7 551-1AB00-0AB0 | FW V1.1 |
表 3-1 模块配置列表
3.1.2 组态工艺对象
驱动装置组态
首先在工艺组态中添加一个定位轴,工艺对象一般的组态方法请参考《S7-1500运动控制使用入门》。文档链接为:
http://support.automation.siemens.com/CN/view/zh/106497710 。这里只描述针对于本例的组态。
由于 V90 接收的是+-10V 模拟量信号,所以模拟量输出模块也要设置输出范围为+-10V。驱动装置类型选择“连接模拟量驱动装置”并在“输出”后面选择模
拟量输出的变量名称。为了在 PLC 内激活使能时(如激活 MC_Power 功能块Enable 管脚)能够把使能信号传递给 V90,勾选激活启用输出,并且选择输出
变量名称。
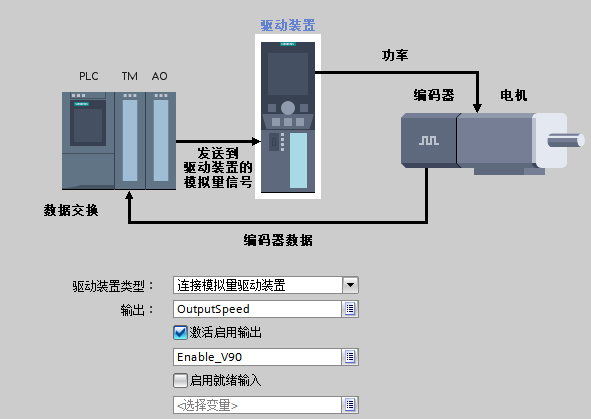
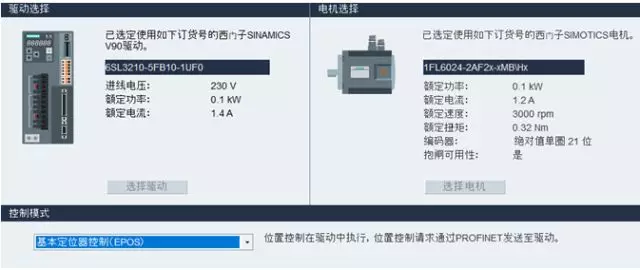
图 3-2 驱动装置选择
需要注意的是输出只能选择变量名称而不能选择地址,所以必须提前定义好变量名称。

图 3-3 定义变量名称
只有定义好的变量名称才能在选择 PLC 变量时显示出来
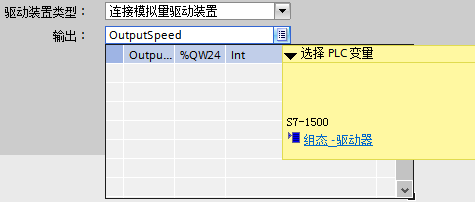
图 3-4 选择变量
位置反馈组态
在本地模块的 TM PosInput2_1 中选择参数设定。
设置通道操作模式为运动控制的位置检测(必须这样设置,才能在随后的编码器连接中选择高速计数模块 TM PosInput2_1 及其通道号)。编码器信号类型选择
增量编码器(A、B、N),反向选择暂不勾选,如果在调试时 PLC 给出的速度给定方向与编码器反馈方向相反,就可以勾选反向来校正编码器反馈方向。
建议信号评估选择四重,这样可以增加位置反馈信号的精度。由于 V90 可以提供信号 N(0 脉冲信号),所以参考标记 0 的信号选择增量编码器的信号 N。接
口标准选择 RS422、对称。
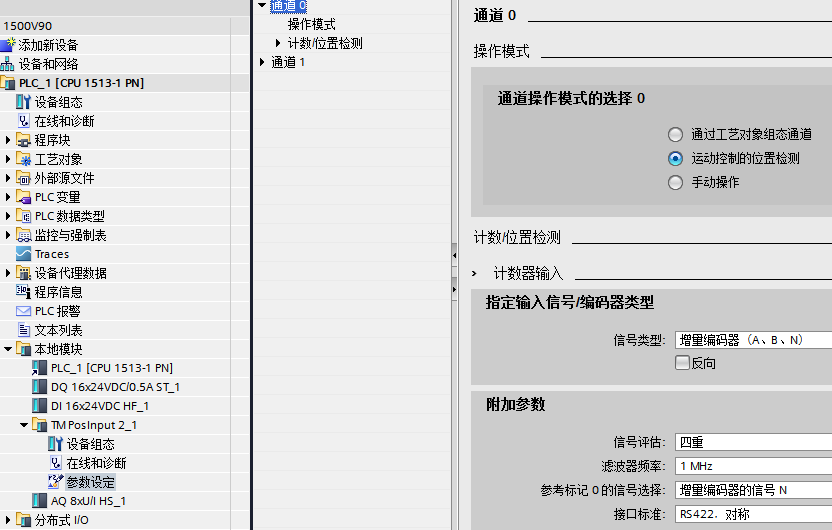
图 3-5 高速计数模块组态
组态编码器连接时选择通过工艺模块(TM)进行连接,并且在选择工艺模块中选择高速计数器通道 0。
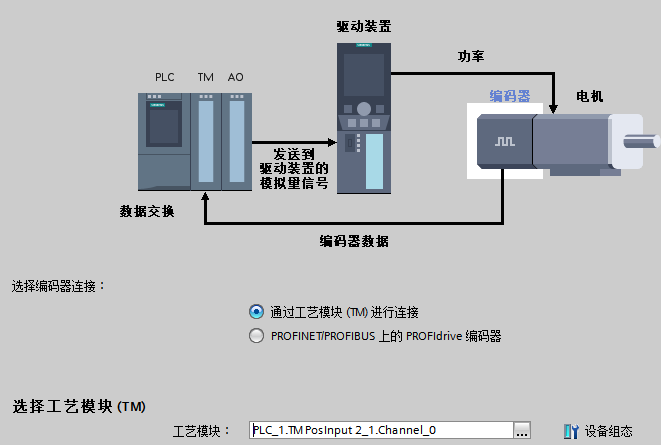
图 3-6 选择编码器连接
编码器类型选择增量式旋转式。单转步数填写 V90 每转输出脉冲个数的 4 倍(信号评估选择了四重),这里填写 4096(4*1024)。增量实际值中的位填写0。
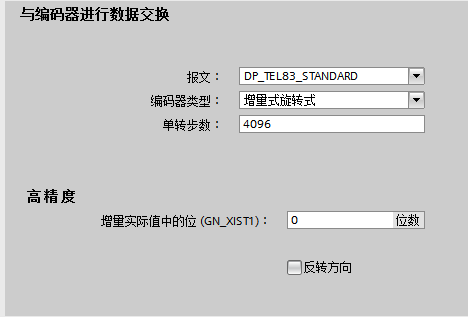
图 3-7 填写编码器参数
3.2 V90 配置
3.2.1 V90 输入输出信号
V90 的参数很多,更详细的参数含义及设置方式请参考 V90 操作说明,其链接为: http://support.automation.siemens.com/CN/view/zh/93005218 。这里只描述与
本例相关的参数设置。
V90 支持速度控制方式,在此方式下 V90 接收来自 S7-1500 的+-10V 模拟量速度给定信号,并把位置值通过 RS422 标准的脉冲信号反馈给 S7-1500,在 S7-
1500 中实现闭环位置调节。这种模式下 V90 本身不设置位置闭环。使能信号也需要 S7-1500 提供,这样可以保证在 S7-1500 建立位置闭环的同时,把使能信
号发给 V90。

图 3-8 速度模式下的 V90 输入输出信号
3.2.2 V90 相关参数设置
本中使用 SINAMICS V-ASSISTANT 软件来设置 V90 的参数。首先要设置 V90操作模式为速度模式,即设置参数 p29003 为 2。
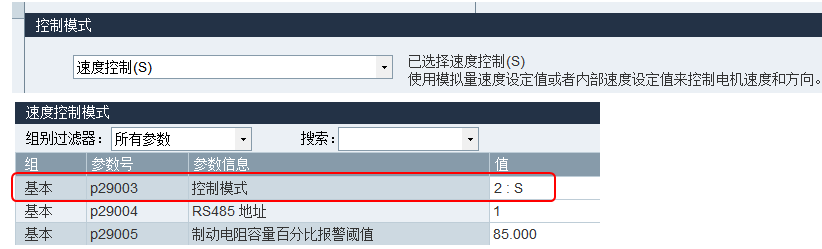
图 3-9 设置速度控制模式
本例中使用 V90 的 X8 接口的 DI1 作为使能输入,即设置参数 p29301 为 1。

图 3-10 设置使能信号
设置 V90 每转线数,也就是电机每圈的脉冲个数。为了与 S7-1500 中的参数相相对性(四重评估,每转步数 4096),这里设置为 1024。
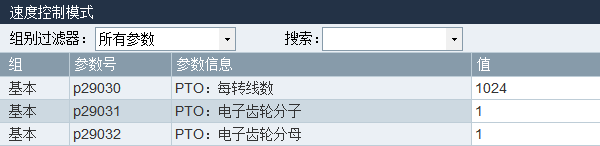
图 3-11 设置每转线数
3.3 S7-1500 与V90
3.3.1使能信号连接
在本例中针对 DO 模块的第 0通道,DO 模块的 1 端子与 V90 X8 接口的 5 端子相连、DO 模块的 10 端子与 V90 X8 接口的 3 端子相连。DO 模块的 9 端子和
10 端子分别要连接 24V+和 0V。其中 DO 模块的 10端子与 V90 X8 接口的 3 端子连接还起到两个系统的等电位连接的作用。
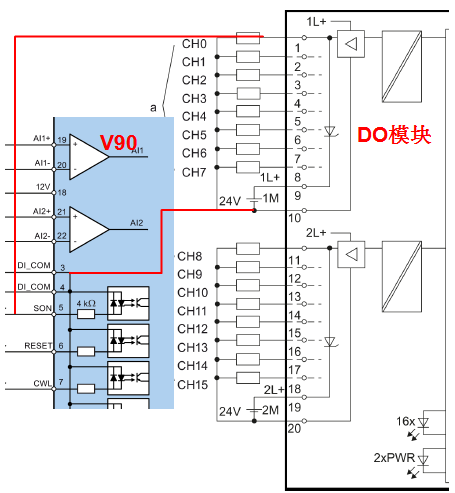
图 3-12 使能信号的连接
3.3.2 速度给定连接
AO 模块输出+-10V 电压信号,针对于第 0 通道 1、2 端子短接后连接 V90 X8 端口的 19 端子,3、4 端子短接后连接 V90 X8 端口的 20 端子。
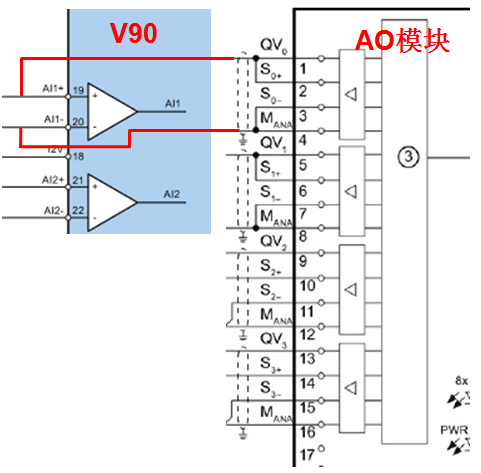
图 3-13 速度给定连接
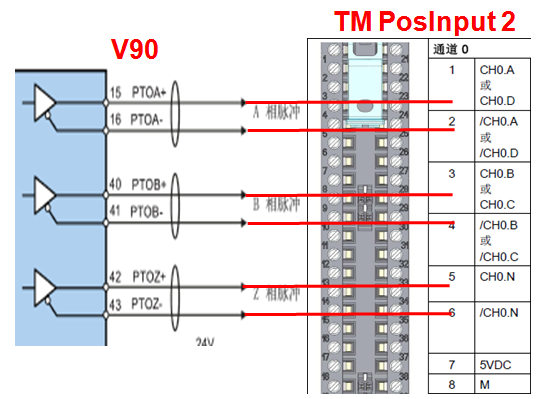
3.3.3 位置反馈连接
分别连接 V90 X8 端口的 15、16 端子到 TMPosInput 模块 1、2 端子;40、41到 3、4 端子;42、43 到 5、6 端子。
3.4 式 使用分布式I/O ET200SP 连接V90
除了前面所描述的使用 S7-1500 *机架模块以外,还可以使用 ET200SP 上的模块连接 V90。新一代的分布式 I/O ET200SP 使用简单,结构紧凑,性能,
支持 PROFINET 网络;可以实现更灵活的配置。
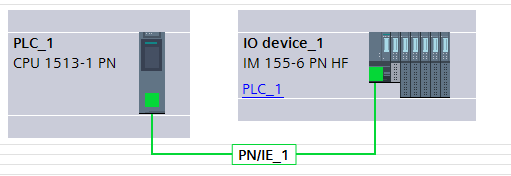
图 3-15 使用分布式 I/O ET200 SP
本例中 ET200SP 站点上的模块见下表。
| 模块名称 | 订货号 | 固件版本 |
| IM155-6PN HF | 6ES7 155-6AU00-0CN0 | FW V2.1 |
| BA 2XRJ45 | 6ES7 193-6AR00-0AA0 | |
| TM PosInput 1 | 6ES7 138-6BA00-0BA0 | FW V1.0 |
| AQ2XU/I HS | 6ES7 135-6HB00-0DA1 | FW V1.1 |
| 服务器模块 | 6ES7 193-6PA00-0AA0 | |
| 基座单元 | 6ES7 193-6BP00-0BA0 | |
| 基座单元 | 6ES7 193-6BP00-0DA0 |
表 3-2 模块配置列表
3.4.1 设置等时同步
闭环运动控制必须有很好的实时性,所以必须设置等时同步。
在网络视图中用鼠标双击连接线“PN/IE_1”在下边的“属性”、“常规”页面内选择“同步域”、“Sync-Domain_1”,设置“PLC_1.PROFINET 接口_1”
的“同步角色”为“同步主站”,设置“IO_device-1”的“RT 等级”为“IR

图 3-16 设置等时同步
还需要设置实际的网络拓扑,在拓扑视图中拖拽连接两个设备的实际网络接口。

图 3-17 设置网络拓扑
在“IO_device_1”的设备视图中选择“属性”、“常规”、“等时同步模式”页面,然后勾选站点以及站点上模块的“等时同步模式”,如下图所示:
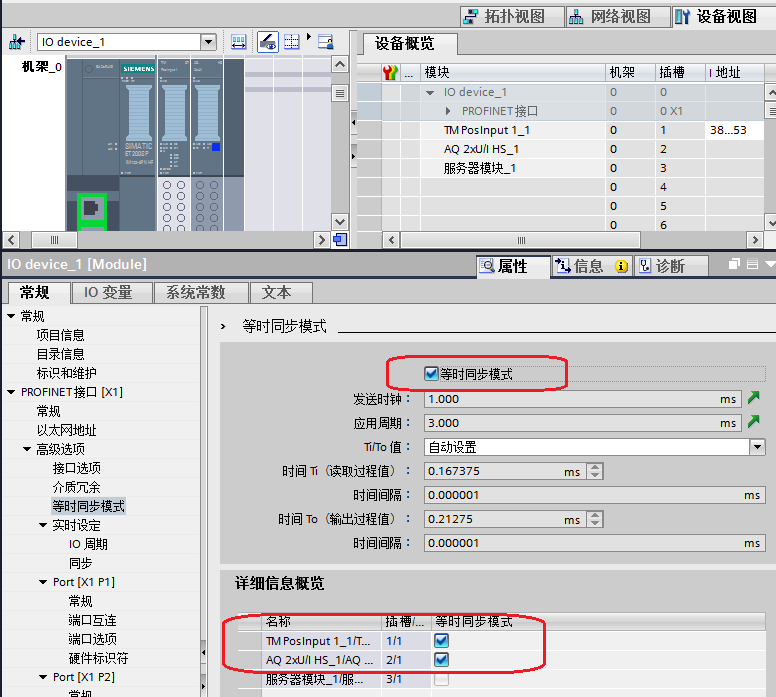
图 3-18 设置模块的等时同步
3.4.2 置 设置OB91 的循环时间
OB91 是 S7-1500 运动控制的核心组织块,为了更好的实现运动控制功能,需要把 OB91 的循环时间同步到总线。具体操作过程是鼠标在 OB91 上点击右键,在
弹出的菜单中选择属性,就会弹出以下页面。在页面中选择“同步到总线”。可根据应用情况选择“因子”,增加“因子”可减轻 CPU 负荷,但会影响控制效果。
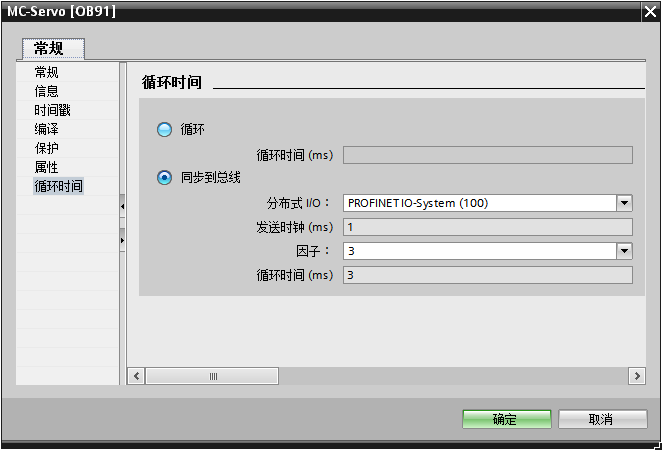
图 3-19 设置 OB91 的循环时间
3.4.3 工艺组态与接线
工艺组态中把驱动接口和编码器反馈接口分别设置到 ET200SP 的模块上,具体的模块组态方法和工艺组态方法与 3.1.2 章节描述的一样。
IO 模块与 V90 的接线与前面所描述的*机架上的模块接线类似,具体参考模
块手册。
TM PosInput 1:
http://support.automation.siemens.com/CN/view/zh/89295917/0/zh
AQ2XU/I HS
http://support.automation.siemens.com/CN/view/zh/73108773/0/zh
3.5 设备调试
至此 S7-1500 与 V90 的组态配置与接线都已经初步完成,可以打开工艺对象的调试界面进行调试,然后就可以编写控制程序了。具体内容可参考帮助文档,这
里不再详述。

图 3-20 调试
西门子V90伺服 PN EPOS新功能-位置跟踪
发表时间:2018-02-01 10:44
在运动控制系统中,经常使用值旋转编码器作为位置反馈,在使用时给用户带来了很多方便,比如在设备断电后位置信息不丢失,不需要重新寻找参考点(回零)。当前西门子V90电机配有单圈值及多圈值两种类型的编码器。 从固件版本V1.01开始,在 EPOS控制模式下可以激活“位置跟踪” (Position Tracking)功能,对于单圈值编码器通过设置编码器的虚拟圈数来扩展单圈值编码器的测量范围。为了解决单圈值编码器测量范围的问题,在实际应用中可以考虑此种方案。
单圈值编码器虚拟多圈的设置步骤:
(1)在V-Assistant中设置V90的控制模式为EPOS控制;
(2)激活位置跟踪功能并设置虚拟多圈圈数;
 提示:配置完成后单圈值编码器被扩展为2048圈编码器(±1024圈)
提示:配置完成后单圈值编码器被扩展为2048圈编码器(±1024圈)
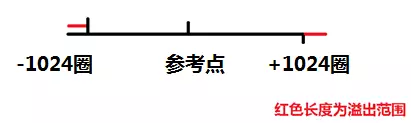
需要注意的事项:
(1) V90 PN单圈值编码器虚拟多圈圈数zui大可以设置为2048圈(行程为±1024圈)
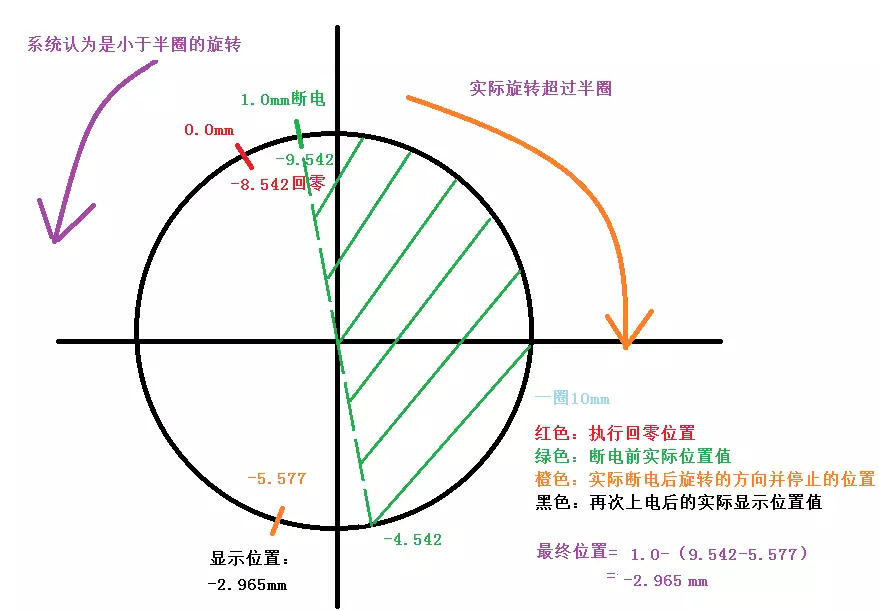
(2)此种应用不允许掉电后编码器移动行程超过半圈,否则掉电再上电后控制器中的实际值与机械轴的位置不再相同,原因如下图所示。
在实际应用中,无论采用单圈虚拟多圈或多圈编码器值编码器,它的测量范围都是有限的,都需要考虑负载的行程,必要时可以设置轴的模态长度。如果未设置轴的模态长度且负载不停地单方向运行,那么一定会造成编码器返回值溢出,此时编码器的值又重新返回零。溢出后如果设备重新上电,所得到的位置值也是不可用的,用户应根据实际情况选择相应的编码器。
