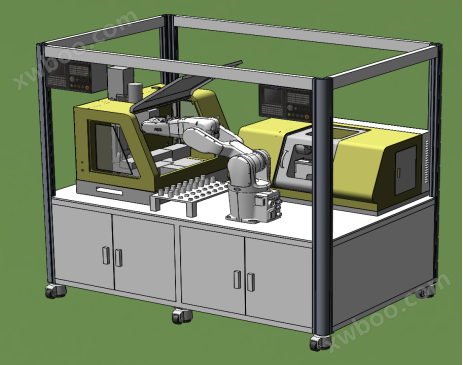
MYJQR-10工业机器人机床上下料实训平台
一、工业机器人机床上下料实训平台,工业机器人机床上下料实训装置,工业机器人机床上下料实训设备产品概述:
可作为大专院校、中高职学生自动化专业、机电一体化专业、机器人专业、企业工程师进行机器人、数控加工、机器视觉检测、材料出入仓库进一体化组建工业4.0智能无人工厂培训,提高阶段综合性学习与训练。 二、工业机器人机床上下料实训平台,工业机器人机床上下料实训装置,工业机器人机床上下料实训设备产品功能:
该套系统综合性强:集工业6关节自由度机器人编程、机器视觉编程、数控加工编程、传感器、PLC、单片机、通讯于一体,将执行机构、控制系统、驱动系统、检测系统及各专业学科有机结合;机器人负责数控机床的上下料工作;当其中一台数控车床零件加工完毕后,自动取出,由机器人送置数控铣床上加工下一道工序,由机器人抓取已加工完毕的零件到视觉检验区,对加工完整性进行视觉检测,如果符合加工要求的零件,机器人则取出保存到合格品暂存区,否则,将保存到不合格品暂存区。学生在熟练掌握该系统的操作与编程以后,也可以对系统加工的产品进行调整或对加工后的合格产品,通过编程由机器人完成自动装配等工序。
三、工业机器人机床上下料实训平台,工业机器人机床上下料实训装置,工业机器人机床上下料实训设备基本实训项目
1、工业机器人实训
2、数控技术实训
3、机器人与机床通讯技术
4、机械结构训练技术
5、气动控制技能培训
6、故障检测技术技能培训
7、传感器技术及应用
8、PLC编程技术
9、机器视觉检测技术
四、工业机器人机床上下料实训平台,工业机器人机床上下料实训装置,工业机器人机床上下料实训设备系统主要配置清单 | 序号 | 名称 | 数量 | 型号 |
| 1 | 工业6轴高速机器人本体 | 1台 | 工作半径0.9米;
工作半径很重要决定了,机器人能否抓取到工件和放下工件的位置设计;
负载 5公斤;
重复定位精度 正负0.025mm;
每个关节的运动范围和速度:
关节 运动范围 速度
轴1旋转 +170°to-170° 288°/s
轴2手臂 +135°to -100° 240°/s
轴3手臂 +70°to -200° 300°/s
轴4手腕 +270°to -270° 400°/s
轴5弯曲 +130°~ -130° 400°/s
轴6翻转 +400°~ -400° 600°/s |
| 2 | 数控车削加工中心本体 | 1台 | CK210-FM 详细参数附后 |
| 3 | 数控铣削加工中心本体 | 1台 | XK200-FM 详细参数附后 |
| 4 | 机器视觉检测单元 | 1套 | 由视觉相机、视觉识别控制器、光圈、安装支架、连接电缆等组成。控制器:机器视觉Halcon HT-U500C机器视觉控制器;相机:500万像素;光源:24V白色30度环形光源。 |
| 5 | 数控车床原料仓 | 1个 | CS01 |
| 6 | 数控车床成品仓 | 1个 | CS02 |
| 7 | 数控铣床原料仓 | 1个 | XS01 |
| 8 | 数控铣床成品仓 | 1个 | XS02 |
| 9 | 西门子PLC控制器 | 1个 | 6ES7 214-1HG31-0xB0 |
| 10 | 西门子PLC扩展IO模块 | 1个 | 6ES7 223-1PL30-0xB0 |
| 11 | 威纶通触摸屏中控台 | 1个 | MT8102IP |
| 12 | 欧姆龙继电器模组 | 2个 | BMZ-R1 |
| 13 | 电子手脉 | 2个 | HLI6 |
| 14 | 车削工业级数控系统 | 1套 | 科源980TB |
| 15 | 铣削工业级数控系统 | 1套 | 科源980MC数控系统 |
| 16 | 6轴机器人控制系统 | 1套 | 本体配套 |
| 17 | 机器人底坐 | 1个 | XKF01 |
| 18 | 三爪气动卡盘 | 1套 | SMC |
| 19 | 铣床自动夹具 | 1套 | SH01 |
| 20 | 机床自动门推拉系统 | 2套 | KIFL3 |
| 21 | SMC 平行机械手夹爪 | 1个 | MHZL2 |
| 22 | 屏蔽电缆 | 3条 | |
| 23 | 计算机 | 1台 | CPU 系列:I7/ 内存容量:8G /硬盘容量:1T /光驱类型:DVD-ROM / 显卡芯片:2G / 音频系统:集成 / (带串口),配置USB鼠标键盘套装,显示器尺寸:25英寸液晶屏。 |
| 24 | 0.6帕空压机 | 1台 | 型;500W; |
| 25 | VR虚实一体仿真实训软件 | 1套 | 定制;详细参数附后。 |
4.1、数控车床技术参数: | 技术参数 |
| 主要性能特点 | 使用220伏电压,全封闭加透明有机玻璃结构、优质铸铁材料铸造、采用高精度研磨滚珠丝杆;
搭载科源980TB工业面板数控系统;
执行国际通用标准G代码编程,支持M代码及S代码,兼容FANUC,三菱G代码和多种CAD/CAM软件( MasterCAM、UG、CAXA等软件编程等);
主要加工材料:钢件、铁件、铜、铝合金、PVC塑料、有机玻璃等 |
| 精度 | 重复定位精度:0.02mm
定位精度:0.03mm
系统分辨率:0.001mm |
| XZ轴行程 | 纵向(X轴):80 mm
横向(Z轴):250 mm |
| 编程软件 | MasterCAM、UG、CAXA等 |
| 主轴转速 | 100~2000 转/分钟 (数控系统G代码控制转速) |
| 回转直径 | 210mm |
| 夹持工件直径 | 1-60mm |
| 主轴通孔 | 20mm |
| 电动刀架工位 | 4工位 |
| 刀架角度/精度 | 360 °/0.005mm |
| 冷却系统 | 水冷 |
| 车螺纹功能 | 有 |
| 主轴/尾轴孔锥度 | 莫氏3号/莫氏2号 |
| 电子手轮 | 4轴三档电子手轮 |
| 数控系统 | 科源 980TB工业面板数控系统 |
| 主轴功率 | 500W |
| 使用电源 | AC220V/50Hz |
| 净重/毛重 | 180/200kg |
| 外型尺寸 | 1000×700×580mm |
| 包装尺寸 | 1100×800×700mm |
| 随机配件 | 冷却系统、电子手轮、三爪卡盘钥匙、呆、内六角扳手、油壶、双头扳手、卡盘反爪、外圆端面车刀、机床硬件说明书、数控系统编程说明书、数控系统操作说明书 |
4.2、数控铣床技术参数: | 技术参数 |
| 主要性能特点 | 全封闭加透明有机玻璃结构、优质铸铁材料铸造、采用高精度研磨滚珠丝杆;
搭载科源980MC系统;
执行国际通用标准G代码编程,支持M代码及S代码,兼容FANUC,三菱G代码和多种CAD/CAM软件( MasterCAM、UG、CAXA等软件编程等);
主要加工材料:铁、铜、铝合金、PVC塑料、有机玻璃等 |
| 精度 | 重复定位精度:0.02mm
定位精度:0.03mm
系统分辨率:0.001mm |
| XYZ轴行程 | 横向(X轴):210mm
纵向(Y轴):95mm
垂直(Z轴):200mm |
| 编程软件 | MasterCAM、UG、CAXA等 |
| 主轴转速 | 100~3500 转/分钟 (数控系统G代码控制转速) |
| 工作台尺寸 | 400×90mm |
| 钻孔直径 | 13mm |
| 铣削直径 | 16mm |
| T型槽尺寸/数量 | 12 mm/3 |
| 主轴锥度 | MT3 |
| 电子手轮 | 4轴三档电子手轮 |
| 数控系统 | 科源980MC数控系统 |
| 主轴功率 | 350W |
| 使用电源 | AC220V/50Hz |
| 净重/毛重 | 145/160kg |
| 外型尺寸 | 845×580×850mm |
| 包装尺寸 | 950×680×950mm |
| 随机配件 | 钻夹头1个、钻夹头钥匙1把、钻夹头锁紧螺杆1根、T型螺母1套、内六角扳手1套、双头扳手1套、油壶1个、钩头扳手2把、顶杆1根,保险丝1个、平口钳1个、钻头1个、单头扳手1把、说明书2套、机床LED照明灯、机床硬件说明书、数控系统编程说明书、数控系统操作说明书 |
4.3、VR虚实一体仿真实训软件:
虚拟现实技术是仿真技术的一个重要方向,是仿真技术与计算机图形学人机接口技术多媒体技术传感技术网络技术等多种技术的集合,是一门富有挑战性的交叉技术前沿学科和研究领域。虚拟现实技术(VR)主要包括模拟环境、感知、自然技能和传感设备等方面。模拟环境是由计算机生成的、实时动态的三维立体逼真图像。VR编程虚实一体化实训平台是基于真实设备1:1建模开发并且可以代替真实机构的一套供学生学习编程及接线的综合性软硬件一体化系统。设备上所有的传感器和执行机构都能在该系统上真实的以三维立体方式反映出来,与实物一模一样。还包含了带真实物理属性的物料和机构。软件系统中的三维机构及传感器,通过数据采集输出板卡往外引出接口。学生可以像控制真实机构那样对其接线和编程。接口输入输出定义开放,由学生自主定义。虚拟仿真教学系统既能采用纯虚拟环境的操作面板(人机界面)、控制器、硬件设备、传感器等,所有操作都在仿真系统中通过鼠标、键盘进行操作,又能采用真实的操作面板(人机界面)、真实的控制器的操作来控制虚拟仿真的硬件设备、传感器等。 以促进学生的全面发展和适应社会需要为宗旨,以培养创新精神和实践能力为核心,通过建设布局相对合理的、省级和校级实验教学示范中心体系,推动高等学校实验教学改革和实验教学中心的建设与发展,实现高等教育人才培养水平的整体提升。可以虚拟工业机器人、自动化加工柔性生产线等,通过对以上各工位的自动化机构建模、虚实一体编程,实现整个自动化过程的虚拟仿真控制。通过软件系统的虚拟仿真调试,先对整个系统或某一工位进行熟悉和掌握,熟练掌握后再上真实的机构上进行实验,有效提高实验效率、使真实设备得到充分利用,提高设备经济投入性价比,解决了设备少学员多难以开展实验实训的难题。
系统特点:
1、形象直观:三维立体模型设计,与真实机构一模一样,可进行缩放、拖动、旋转、恢复视角等操作。特殊部件进行了透明处理、放大处理、可视化处理、慢动作处理等,相比实物机构更加形象直观。
2、安全可靠:通过三维仿真运行,在完成与真实机构相同实验的同时,避免了如人身触电安全事故、机械运行时碰撞夹手等安全事故;没有设备长时间运行造成的磨损、故障等;没有学生误操作造成的设备损坏等;是一台永、永无安全事故的实验机构。
3、扩展性强:只需通过软件定义,不需作硬件升级,可根据学校的需要扩展其他实验项目,不需增加硬件成本,不占用实验室空间;并支持学校进行个性化功能定制。
4、★虚实结合:仿真软件系统可硬件连接,可实现用实物示教器示教编程控制虚拟的机械手及控制对像;也可以使用虚拟的示教器控制虚拟的机械手及控制对像;也可以使用虚拟的示教器控制真实的机械手及控制对像,做到虚拟与现实的无缝对接。通过软件模拟易于损坏的机构,模拟肉眼不方便观察的现像,模拟具有安全事故风险的机构。解决了在纯软件实验做完实验后无法进行真实的调试,从没接触过任硬件设备的虚幻感;同时又避免了纯硬件模拟实验现像的不直观问题;避免了纯硬件真实模型实验机构成本高、易损坏、不直观、存在安全事故等问题。做到了虚拟与现实的结合。
5、★身临其境,沉浸式体验。佩戴上VR头盔则可以进入到三维虚拟场景中,观看设备运行。可以对设备操作,可以在场景中进行自由的行走观看,从各个角度观看设备的认识和了解设备的机构和运作的原理。
6、★仿真软件配置数据采集输入输出卡,模拟真实机器人控制器的IO输入输出器,可与外部真实硬件PLC、单片机等实物相连,动手进行实际的连线、编程、调试,保证实验的真实性和体现感,锻炼了学生的动手能力。
硬件参数:
1、采用微处理器AMR芯片设计,完成数据信号输出、电平输入、模拟量输出、模拟量输入、脉冲输出、脉冲输入等信号。信号经光电隔离,有效防止干扰,可靠性好;
2、★输出接口挂箱:铝合金加塑料挂箱壳体,美观大方;铝合金氧化面板工艺,通过安全插座将输入输出接口线引出到面板上,面板上标记相应的端口号,方便学生自定义灵活接线、灵活实验,同时设置了排线模式接口,可通过排线接口一次性将所有连线与CPU快速连接,缩短实验时间;
3、★信号输出:30路,输出电流>2A,光电隔离输出;
4、★电平输入信号采集:30路,检测直流24V输入信号;
5、★模拟量输入:6路模拟量输入采集,4-20ma/0-5V输入采集;
6、★模拟量输出:2路模拟量输出,4-20ma/0-5V输出;
7、★脉冲输入:2路脉冲信号检测,检测范围0-100KHZ,用于控制步进电机、伺服电机等;
8、★脉冲输出:3路脉冲信号输出,输出频率范围0-50KHZ,用于旋转编码器等设备的信号输出;
9、通讯方式:USB通讯;
10、带软件加密;
11、VR眼镜参数(教师机配一台,学生机以后可选配)
.1显示屏:2个3.5英寸3K AMOLED显示屏
.2分辨率:双眼:2880*1600 单眼:1440*1600视场角 110度
.3调节功能:可调整镜头距离(适配佩戴眼镜用户)、可调整瞳距、可调式耳机、可调式头带、刷新率 90Hz
.4兼容系统:支持使用 SteamVR 2.0 定位系统,将能同时使用 4 个 Base Station,活动空间翻倍扩展至 10 平方米。
.5功能特点:传感器 SteamVR追踪技术,G-sensor校正,gyroscope陀螺仪,proximity距离感测器,瞳距感测器
.6蓝牙功能:支持蓝牙,音频输入:内置麦克风,Hi-Res Audio认证头戴式设备,Hi-Res Audio认证耳机(可拆卸式),支持高阻抗耳机纠错,接口 USB3.0,Displayport1.2。
软件参数:
1、虚拟自动化机构、机器人本体等真实本体外形外观一致,按照1:1的比例设计。。可实现各个方位各个角度的不同姿态的运动。
2、支持虚拟控制器仿真运行,也支持真实控制器在线监视运行。
3、支持远程操作机器人。单个关节移动,线性移动多种模式移动。
4、支持单点定位移动。左侧原点,右侧原点,正面原点定位移动。
5、支持机器人IO读写操作,可读取机器人输入输出状态。可写入。
6、支持远程状态监控、关节数据监控,可读取机器人每个关节的角度数据。也可读取机器人当前的操作模式和电机状态。
7、支持多种任务选择,可自动切换加工工件。可自动切换机器人抓手工具。
8、支持VR头盔视野和操作者电脑界面视野同时显示。两者独立互补影响。
9、支持VR头盔场景的手柄交互,和电脑界面的鼠标交互。两者独立互补影响。
10、支持真实示教器编程,也可虚拟示教器编程。同样实现虚拟三维本体运行。
11、可实现物体的抓取、释放、搬运。且物体具有物理属性,重力、弹力、摩擦力等。
12、支持手动操作,自动操作两种模式。可调节运动速度。
13、支持场景自由旋转、放大、缩小、移动。支持正交、透视模式。支持复位示教。
14、支持机器人碰撞检测:关节碰撞检测、工具碰撞检测。当发生碰撞后,高亮红色显示碰撞物体,并立即切断机器人电机起到保护作用。
15、支持虚拟边界保护,当运动范围超出预设的范围边界时。预设的边界会高亮红色显示。并立即切断机器人电机起到保护作用。
16、支持连续碰撞保护,或者连续超出边界保护。支持复位操作。
17、支持运动轨迹描绘,可以将机器人运动的轨迹实时记录并生成三维轨迹线条。让学生更直观的分析查看机器人运动的轨迹。支持复位轨迹。
18、支持三维示教点位,可以用虚拟示教器示教,也可用真实示教器示教。
19、支持实训任务的扩展。增加实训加工的工件和工具。
20、支持外部真实环境保护系统。可外接安全门,安全光栅。
21、支持机器人所有的相关指令,直线,圆弧,关节运动等。
22、支持TCP示教,工件坐标系建立等。
23、真实控制器连接采用标准以太网方式连接。
24、支持添加外部传感器。
友情提示:
1、设备验收:各采购单位收货时请检查工业机器人机床上下料实训平台的货品外观,核实设备的数量及配件,拒收处于受损状态的设备;
2、设备质保:茂育将为各采购单位提供工业机器人机床上下料实训平台产品说明书和质保期,在质保范围内提供对设备的免费维修,超出条件承诺时提供对设备的有偿维修;
3、设备退换货:各采购单位单方面原因导致的工业机器人机床上下料实训平台选型错误或设备购买数量错误,造成设备的退换货要求,将不被接受;
4、设备货期:对工业机器人机床上下料实训平台的发货期为参考值,如您需要了解设备的精确货期,请与上海茂育的销售人员联系;
5、:如各采购单位对工业机器人机床上下料实训平台有任何疑问,请致电: ,我们将由专业技术人员为您提供有关设备的技术咨询;
找不到想找的产品?请点击产品导航页