MYJQR-15工业机器人视觉识别应用实训平台
一、工业机器人视觉识别应用实训平台,机器人视觉识别应用实训系统,工业机器人视觉识别应用实训装置概述
平台以工业机器人与机器视觉为核心,将机械、气动、运动控制、电气控制、伺服驱动、变频调速、传感检测、条码或二维码读取、RFID读取、编码器技术、PLC控制技术有机地进行整合,结构模块化,便于组合,实现对高速传输线上的不同物料进行快速的检测、组装。为了方便实训教学,系统进行了专门的设计,可以完成各类机器人单项训练和综合性项目训练,可完成各类机器人单项训练和综合性项目训练。可以进行六轴机器人示教、定位、抓取、装配、物流等训练,可以在此基础上进行产品柔性包装、零件组装、激光焊接、三维检测、点胶、锁螺丝等实际工业应用项目。
二、工业机器人视觉识别应用实训平台,机器人视觉识别应用实训系统,工业机器人视觉识别应用实训装置的结构和工作过程
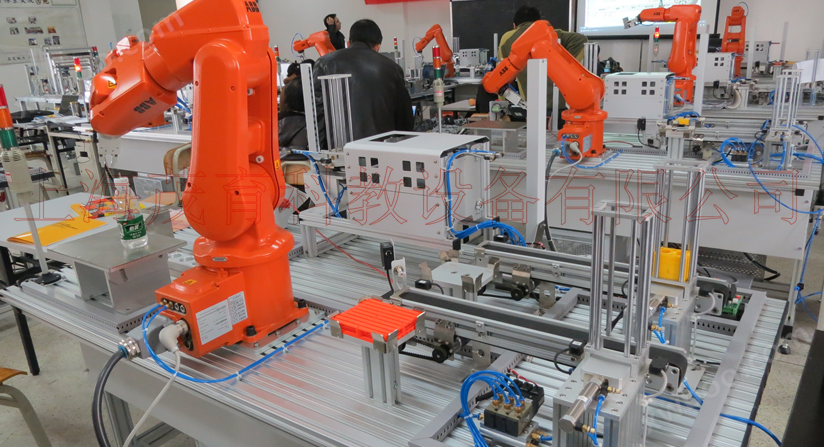
在铝合金导轨式实训台上安装大工件出料装置、伺服搬运机械手、模拟冲床加工、小工件给料装配、自动传送分拣、6自由度工业机械手搬运、智能仓储入库等工作站,构成一个典型的机电一体化设备的机械平台;电气控制采用RS485串行通讯方式实现分布式的控制,从而组成自动加工、装配生产线,真实呈现自动生产线的柔性加工过程。
各工作站的结构和功能如下:
⑴ 供料站
供料站主要由料仓及料槽、推料气缸和物料台以及相应的传感器、电磁阀构成。
本站工作过程如下:系统启动后,推料气缸推出,把料槽中层的工件推到物料台上工件抓取位。工件到位传感器检测到工件到位后,推出气缸气缸缩回。搬运站机械手伸出并抓取该工件,并将其运送往加工站。
⑵加工站
加工站主要由物料台、夹紧机械手、物料台伸出/缩回气缸、加工(冲压)气缸以及相应的传感器、电磁阀构成。
本站的功能是完成一个对工件的冲压加工过程,流程如下:
搬运站机械手把工件运送到物料台上→机械手指夹紧工件→物料台回到加工区域冲压气缸的下方→冲压气缸向下伸出冲压工件→完成冲压动作后向上缩回→冲压气缸缩回到位→物料台重新伸出→到位后机械手指松开→搬运站机械手伸出并夹紧工件,将其运送往装配站。
⑶装配站
装配站主要有供料单元、吸盘式装配单元、放料台以及相应的传感器、电磁阀构成。
本站功能是完成装配工序,即把黑色或白色两种小圆柱工件嵌入到大工件中的装配过程。
当搬运站的机械手把工件运送到装配站物料台上时,推料气缸伸出,使料槽中层的小圆柱工件落到旋转供料台上,然后吸盘式装配机构伸出吸盘→抓取小圆柱→手爪提升→手臂伸出→手爪下降→手爪松开的动作顺序,把小园柱工件顺利装入大工件中,搬运站机械手伸出并抓取该工件,并将其运送往物料分解站。
⑷分拣站
分拣站主要有传送带、变频器、三相电机、推料气缸、电磁阀和定位光电传感器及区分黑白两种颜色的光纤传感器构成。
本站的功能是完成从装配站送来的装配好的工件进行分拣。当搬运站送来工件放到传送带上并为入料口光电传感器检测到时,即启动变频器,工件开始送入分拣区,如果进入分拣区工件为金属,由检测金属的电感式传感器作为1号槽推料气缸启动信号,将黑色料推到1号槽里;如果进入分拣区工件为白色,则由检测白色物料的光纤传感器动作,作为2号槽推料气缸启动信号,将白色料推到2号槽里,如果进入分拣区工件为黑色,由检测黑色的光纤传感器作为3号槽推料气缸启动信号,将黑色料推到3号槽里。。自动生产线的加工结束。
⑸伺服输送机构
伺服输送机构主要有伺服电机、伺服电机驱动器、同步带式线性导轨、四自由度搬运机械手、电磁阀和原点定位开关构成。
本站的功能是完成向各个工作单元输送工件,系统分为四自由度抓取机械手单元和直线位移位置精确控制单元两部分,系统上电后,先执行回原点操作,当到达原点位置后,若系统启动,供料站物料台检测传感器检测到有工件时,机械手整体先提升到位后手爪伸出到位后手爪夹紧,手爪夹紧到位手爪开始缩会机械手整体下将到位后,步进电机开始工作按设定好的脉冲量到加工站。加工站到位后机械手整体提升,提升到位后手爪伸出伸出到位后机械手整体下降,下降到位后工件已放入加工站物料台上,然后手爪松开,松开到位后机械手回缩,等加工站加工完成后再将工件送到装配站和分拣站完成整个自动生产线加工过程。
(6)6自由度工业机械手搬运
由6自由度工业机械手本体(RV-2F-1D-S11)、工业机械手驱动器(CR751-D)、抓手输入输出电缆、I/O通讯模块、控制电缆、示教器、夹紧机械手相应的传感器、电磁阀构成。六轴机器人对经过检测分拣单元检测合格的工件进行搬运,搬运到智能仓库单元供入库。
(7)智能立体仓库
立体仓库装置为四层十六仓位库体,主要由机械部件、电气控制部件及上位机组态三部分组成。具备三维运动控制功能(X、Z轴完成仓位定位、Y轴完成物料放入与取出);
机械部件为可拆装式模块化结构,由底板(由工业组合型铝型材组成)、库体(全铝结构)、垛手(全铝结构)、蜗轮传动部件、滚珠丝杠、光杠、异型铝材、气缸、手指及按钮角板等部分组成;
电气部件由西门子PLC(CPU226 DC/DC/DC,也可选配其它常用PLC)、步进电机、步进电机驱动器、单相漏电保护器、熔断器、开关电源、继电器、电感式接近开关、微型光电开关、行程开关、按钮、工程拖链及集成电缆接线系统等部分组成;
触摸屏组态监控使用MCGSTPC7062型触摸屏,在上位机上可进行各种功能设定及选择,并能实时监控仓库的状态并可对其进行控制。
三、工业机器人视觉识别应用实训平台,机器人视觉识别应用实训系统,工业机器人视觉识别应用实训装置系统控制方案
根据机械平台的上述工艺过程, 采用RS485串行通讯方式实现分布式的控制系统。
采用RS-485总线的PLC互连网络。
采用了触摸屏人机界面,而每种通讯网络又按所选用不同的主流PLC厂家而有不同的配置,分述如下:
1、采用RS-485总线的PLC互连网络的控制方案
本控制方案的目标,是使学生通过实训,掌握RS-485通讯技术和采用广播方式实现PLC之间交换信息的PLC互连技术。作为PLC通讯网络的基本技术,并鉴于采用RS-485总线的PLC互连网络广泛用于小型集散控制系统上,熟练掌握这一技能,是高职学生的。
本装备分别有西门子S7-200系列,三菱FX2N系列的PLC配置,用户也可选择其它厂家的控制器系统。
1)西门子S7-200系列
本方案采用PPI(点对点接口)协议实现通讯,以触摸屏(TPC7062)和搬运站PLC(S7-226)为智能仓库站控制系统.
2)三菱FX2N系列:
本方案采用FX2N 的N:N通讯网络。各工作站均插上FX2N-485-BD通讯板,以搬运站PLC(FX2N-48MT)为主站,其余各站为从站构成N:N通讯网络。触摸屏连接到主站编程口上,分拣站的FR-D700变频器也作为第5# 从站连接到网络上。同时安装有伺服控制器用的定位模块,各站PLC的型号见配置清单。
四、工业机器人视觉识别应用实训平台,机器人视觉识别应用实训系统,工业机器人视觉识别应用实训装置本装备的特点:
1、有机融合了机械技术(包括气动技术)、传感器技术、交流电动机变频调速和步进电机驱动控制、伺服电机控制技术、工业机器人控制技术、触摸屏技术、PLC控制及通信网络等技术,体现了现代制造业生产过程的特征。
2、整体结构采用开放式和拆装式,能方便地更换模块,按具有生产性功能和整合学习功能的原则确定模块内容,使教学或竞赛时可方便的选择需要的模块。
3、用于教学,可按工作过程导向,工学结合的模式规划教学活动,完成以下工作任务:
1)气动系统的安装与调试项目:
选用该装备配置的单出杆气缸、单出双杆气缸、旋转气缸等气动执行元件和单控电磁换向阀、双控电磁换向阀和磁性开关等气动控制元件,可完成下列气动技术的工作任务:
气动方向控制回路的安装;气动速度控制回路的安装;摆动控制回路的安装;气动顺序控制回路的安装;气动机械手装置的安装;气动系统安装与调试;
2)电气控制电路的安装和PLC程序编写项目:
选用该装置配置的PLC模块、交电机变频器模块、伺服电机控制模块、步进电机驱动模块、传感器等,可完成下列PLC应用技术工作任务:
电动机控制电路的连接与控制程序编写;电动机调速控制电路的连接与控制程序编写;步进电机控制电路的连接与控制程序编写;伺服电机控制电路的连接与控制程序编写;气动方向控制程序编写;气动顺序动作控制程序编写;气动机械手控制程序编写;皮带输送机控制程序编写;机电一体化设备控制程序编写;自动生产线控制程序编写。
工业机械手的控制:机械手多速度段运行控制、启动与制动变速实训、多点定位控制、机器人原点与复位、机器人单步与连续控制、多细分度与脉冲实训、 网络IO监控机器人工作状态等控制程序的编写。
3)PLC通讯网络的安装、程序编制及调试:
4)机电设备安装与调试项目
选用该装置配置的机电一体化设备部件、PLC模块、变频器模块和指令开关、传感器等,可完成下列机电设备安装和机电一体化技术的工作任务:
传动装置同轴度的调整;皮带输送机的安装与调整;搬运机械手设备安装与调试;物件分拣设备的安装与调试;送料设备的安装与调试;自动生产线设备安装与调试。
4、本装备用于考核或技能竞赛,可考察的职业能力:
机械构件的装配与调整能力;机电设备的安装与调试能力;电路安装能力;气动系统的安装与调试能力;机电一体化设备的控制程序的编写能力;自动控制系统的安装与调试能力。PLC网络的安装、编程与调试能力。
该实训考核装置主站PLC模块的I/O 端子、变频器的接线端子、各常用模块与PLC的连接端子,均与安全插座连接,使用带安全插头的导线进行电路连接;各指令开关、光电开关、传感器和指示元件的电路,则通过端子排进行连接。插拔线连接电路与端子排连接电路相结合,既保证学生基本技能的训练、形成和巩固,又保证电路连接的快速、安全和可靠。
友情提示:
1、设备验收:各采购单位收货时请检查工业机器人视觉识别应用实训平台的货品外观,核实设备的数量及配件,拒收处于受损状态的设备;
2、设备质保:茂育将为各采购单位提供工业机器人视觉识别应用实训平台产品说明书和质保期,在质保范围内提供对设备的免费维修,超出条件承诺时提供对设备的有偿维修;
3、设备退换货:各采购单位单方面原因导致的工业机器人视觉识别应用实训平台选型错误或设备购买数量错误,造成设备的退换货要求,将不被接受;
4、设备货期:对工业机器人视觉识别应用实训平台的发货期为参考值,如您需要了解设备的精确货期,请与上海茂育的销售人员联系;
5、:如各采购单位对工业机器人视觉识别应用实训平台有任何疑问,请致电: ,我们将由专业技术人员为您提供有关设备的技术咨询;
找不到想找的产品?请点击产品导航页