




品牌
经销商厂商性质
上海市所在地
西门子6ES73146EH044AB1代理商
面议西门子6ES73135BG040AB0代理商
面议西门子6ES73125BF040AB0代理商
面议西门子6ES73121AE140AB0代理商
面议西门子3RW30141CB04代理商
面议西门子6SE6430-2UD41-3FB0变频器
面议西门子6SE6430-2UD41-6GB0变频器
面议西门子6SE6430-2UD42-0GB0变频器
面议西门子6SE6420-2UD31-1CA1代理商
面议西门子6SE6400-0BP00-0AA0代理商
面议西门子6SE6400-1PB00-0AA0代理商
面议西门子6SE6400-1DN00-0AA0代理商
面议西门子IPC347D工业计算机 西门子IPC347D工业计算机
我公司经营西门子*现货PLC;S7-200S7-300 S7-400 S7-1200 触摸屏,变频器,6FC,6SNS120 V10 V60 V80伺服数控备件:*电机(1LA7、1LG4、1LA9、1LE1),国产电机(1LG0,1LE0)大型电机(1LA8,1LA4,1PQ8)伺服电机(1PH,1PM,1FT,1FK,1FS)西门子保内*产品‘质保一年。一年内因产品质量问题免费更换新产品;不收取任何费。咨询。
追求,追求精确
要通过“严格”的检验程序,以可编程控制器(PLC)产品为例,在整个生产过程中针对该类产品的质量检测节点就超过20个。视觉检测是数字化工厂*的质量检测方法,相机会拍下产品的图像与Teamcenter数据平台中的正确图像作比对,一点小小的瑕疵都逃不过SIMATIC IT品质管理模块的“眼睛”。对比传统制造企业的人工抽检,这显然要可靠又快速得多。”
1. 项目基本信息
Basic Project Information
汽车总装物流自动化系统,系统中使用了西门子的CPU319F、ET200s、G120、Comfort Panel。升降机设备使用的变频器是西门子G120:CU250S-2PN (6SL3246-0BA22-1FA0),PM240 45kw (6SL3224-0BE33-7UA0)
下图为总装厂内饰线物流设备和系统网络结构图:
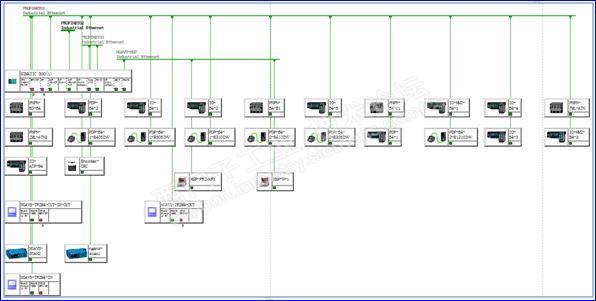
图1系统网络结构图
2. 问题描述
Problem description
用户反映有以下几个问题:
问题一:总装厂内饰4线的升降机有时会出带车身下降无法快速减速的现象,升降机会快速下滑,类似于失速,目前通过降低升降机的速度可以暂时使用。
问题二:升降机下到位停止时,车盘抖动剧烈。
升降机的功能是将车身从二层下放到一层(图2),升降机下降时,变频器高输出频率运行在50Hz,遇到减速开关时输出频率设为8Hz,遇到到位开关时,变频器给停车命令,同时抱闸将电机抱死。
现场观察发现:经常出问题的升降机在空车盘运行时,不会出现用户描述的问题一现象,下降到位停止时,车盘上下晃动较大。当车盘带车身下降时,遇到减速开关不能快速减速到8Hz,车盘直接撞到硬限位开关,电机抱闸将电机抱死。在此过程中,变频器不报警。
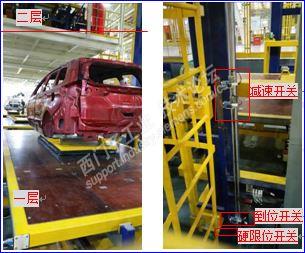
图2 升降机设备
3. 问题分析
Problem Analysis
问题一:升降机不能快速减速,且变频器不报错
1) 升降机下放重物,电机工作在发电状态,变频器应禁用Vdmax控制器,启用能耗制动,利用变频器集成的制动单元和外部制动电阻消耗能量。检查变频器接线,尤其是制动电阻的接线是否正确。检查变频器参数设置P1240/P1280,是否禁用Vdmax控制器。检查P219制动功率设置是否正确。
2) 考虑制动电阻的制动功率是否合适。
3) 实际速度与设定速度不*时,变频器默认设置可以报A7903,且作为状态字Bit8通过通讯报文返回给PLC。需检查报警记录,并检查G120的Speed Message设置。
问题二:升降机下放到位停止时抖动
1) 考虑是否是变频器控制性能问题导致抖动。需要测试变频器从50Hz输出减速到0Hz输出(ON命令保持),观察升降机的稳定性。装置是否动态优化。
2) 考虑抱闸逻辑及机械影响。需要测试在变频器零速输出时,先抱闸再给停车命令。
4. 问题处理步骤
Problem Solving Steps
1)检查变频器接线和制动电阻接线,正确。变频器参数设置P1240=0、P1280=0,Vdmax控制器已经禁用。
2)变频器以50Hz设定值运行时,其运行曲线见图3。当速度设定值(红线)迅速下降时,编码器反馈的速度实际值(黄线)缓慢下降,直到碰到硬限位开关,电机抱闸抱紧,实际速度才变为0。图3中,设备在加速和减速转折点处的功率(浅蓝线)大,但在减速过程中一直被限制在-13.75kw左右,且减速转折点处的输出转矩(深黄线)只有-90Nm左右。

图3 闭环矢量控制 输出频率50Hz P1531=-13.75kw
采用矢量闭环控制方式时,其转矩输出除了受转矩上下限影响以外,还受电流限制值和功率限制值影响(图4)。检查P1530和P1531(图5),P1531=-13.75kw。因此可以判断:在下降过程中,变频器受功率限制值的影响,转矩输出被限制。
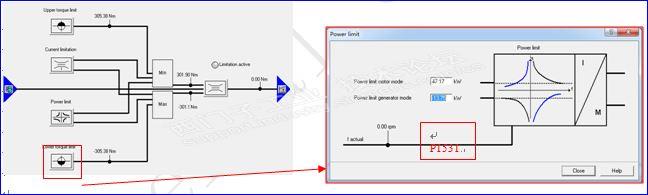
图4 转矩限制 图5功率限制
3)用户提到的在降低输出频率(40Hz)的情况下,不会出现速度减不下来的问题。图6为闭环矢量控制,设定频率为40Hz,P1531=-13.75kw时的运行曲线,功率(浅蓝线)仍被限制在-13.75kw左右,当设定速度(红线)下降时,实际速度(黄线)其实并不能很好的跟随减速,主要原因还是功率限制影响了转矩输出,但速度降低以后刚好输出转矩可以满足负载要求,因此速度再次受控,不会表现出明显的速度不受控现象。

图6闭环矢量控制 频率输出40Hz P1531=-13.75kw
4)图7为V/F控制方式下,输出频率50Hz,P1531=-13.75kw时的运行曲线。此时的功率(浅蓝线)不受P1531的限制,在减速转折点处功率达到-22kw左右,转矩输出(深黄线)达到-155Nm左右,因此,在闭环矢量控制时,应设置P219>22kw(P1531会自动设置为-P219)。
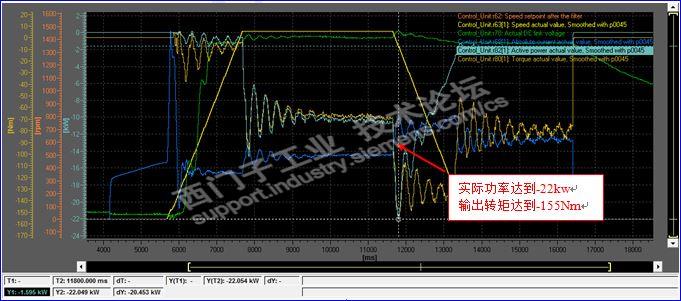
图7 V/F控制方式 输出频率50Hz P1531=-13.75kw
5)为电机做静态优化和带编码器的动态优化,由于升降机的驱动电机是一用一备,因此可以切换到备用电机上做动态优化,并将原来电机的编码器线安装到备用电机上,注意在Scout中设置P410=1,将编码器方向取反。做动态优化时,需要强制抱闸打开。优化完毕后将电机和编码器接线恢复,并设置P410=0,P219=25kw,参数上传保存,并copy RAM to ROM。图8为修改参数后变频器的运行曲线,在减速转折点附近的功率(浅蓝线)达到-20kw,转矩输出达到-150Nm左右。

图8 闭环矢量控制 输出频率50Hz P1531=-25kw
6)为了进一步确认P1531对闭环矢量控制下转矩输出的影响,设置P1531=-10kw(图9)。当设定频率为50Hz时,功率(浅蓝线)被限制在-10kw,转矩输出(深黄线)被限制在-62Nm左右,电机失速(实际速度大于大速度限制值1500rpm),报故障F7902,变频器OFF2停车,电机抱闸抱死。因此功率限制值P1530、P1531的设置限制了闭环矢量控制的转矩输出。
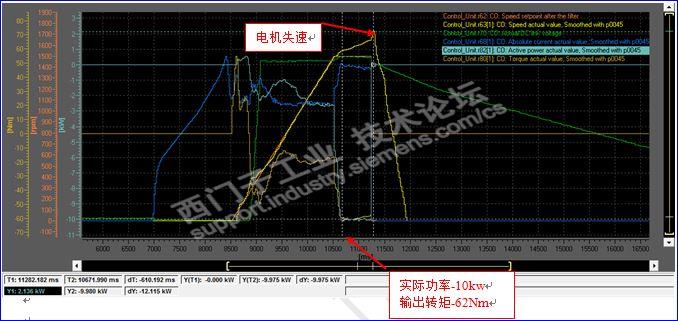 图9 闭环矢量控制 输出频率50Hz P1531=-10kw
图9 闭环矢量控制 输出频率50Hz P1531=-10kw
7)在Scout中在线查看G120的Alarm History,当出现实际速度与设定速度相差很大的情况时,变频器报警A7903,但在变频器屏幕上没能及时看到此报警,因为出现的时间太短(小于1秒),但是报警点已经通过通讯报文状态字1的bit8返回给了PLC(图10),用户并没有使用此位参与控制抱闸。用户希望此报警直接变成故障输出。设置参数P2106=2197.7,利用此点激活外部故障1(F7860),变频器停止输出,电机抱闸抱死。图11为设置外部故障参数前变频器运行曲线,图12为设置外部故障后的运行曲线。
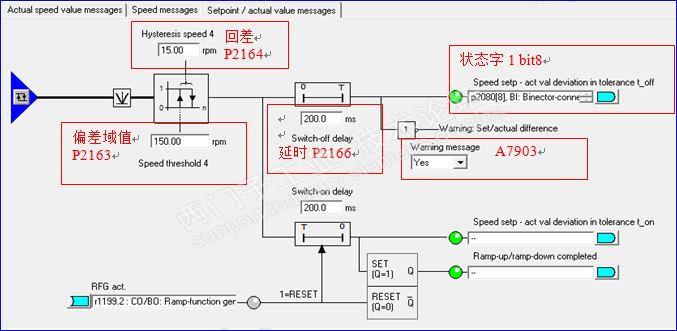
图10速度监控
图11实际速度(黄线)与设定速度(红线)差值大于P2163+P2164(150rpm+15rpm),超过P2166(200ms),抱闸无动作。
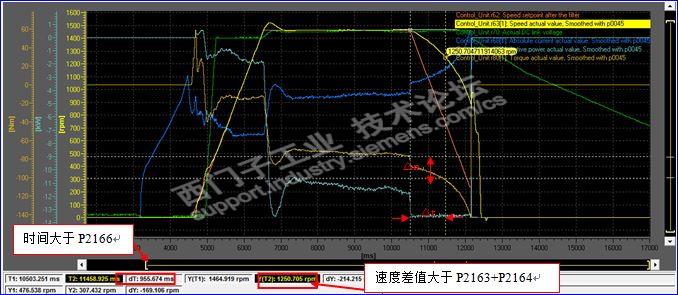
图11 设置P2106=2197.7之前
图12实际速度(黄线)与设定速度(红线)差值大于P2163+P2164(150rpm+15rpm),超过P2166(200ms),变频器停止输出,电机抱闸抱死。
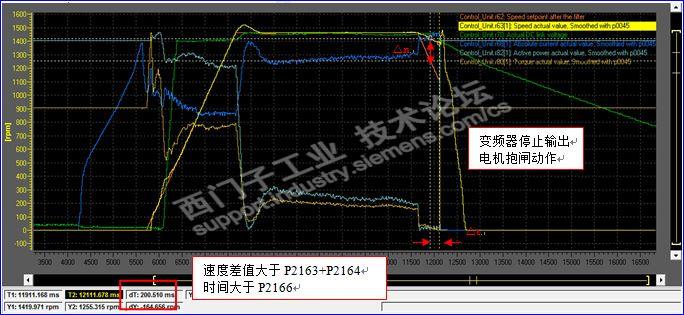
图12 设置P2106=2197.7之后
8)升降机下降到位时,车盘上下抖动。首先,测试在变频器输出从50Hz减速到0Hz时的稳定性。当车盘遇到减速开关时,控制其直接减速到0Hz,On命令始终接通,图13为测试曲线,图中可以看出设定速度(红线)从高速减到0rpm时,实际速度(黄线)只在接近0rpm时经过了一个波谷(偏差<20rpm)就稳定在0rpm了,考虑到减速箱的减速比为1475/41,这个波动几乎无法察觉。变频器在0rpm时输出转矩(紫线)为110Nm左右,可以将车盘稳稳悬停。因此车盘抖动不是变频器闭环矢量控制参数的问题。
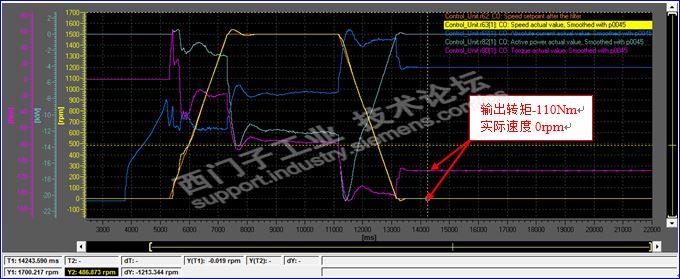
图13闭环矢量控制 0rpm输出测试
9)用户的抱闸是由PLC输出直接控制的,当变频器ON命令保持,0rpm输出时,强制抱闸输出抱紧电机时,车盘不晃动,说明抖动不是机械上的问题。需要用户查看抱闸控制逻辑,并注意抱闸动作所需时间。
10)检查用户关于变频器控制部分的程序FB101(图14)。当变频器既没有正转命令又没有反转命令时,PLC发给变频器的控制字为16#476,也就是说当车盘下降到位或上升到位时,变频器接收到的控制字为16#476(2#0000 0010 0111 0110),即PLC控制变频器OFF1停车(bit0)并脉冲封锁(bit3)。因此,在车盘下到位停止时,变频器得到脉冲封锁命令,变频没有转矩输出。变频器停止时速度设定值(红线)直接变为0,没有按P1121(2秒)斜坡下降,转矩输出(深黄线)直接变为0。车盘相当于自由停车,此时抱闸刚刚开始动作还没有抱紧,因此车盘下降速度(黄线)突然增大,而后抱闸抱紧,车盘停止,实际速度变为0rpm。
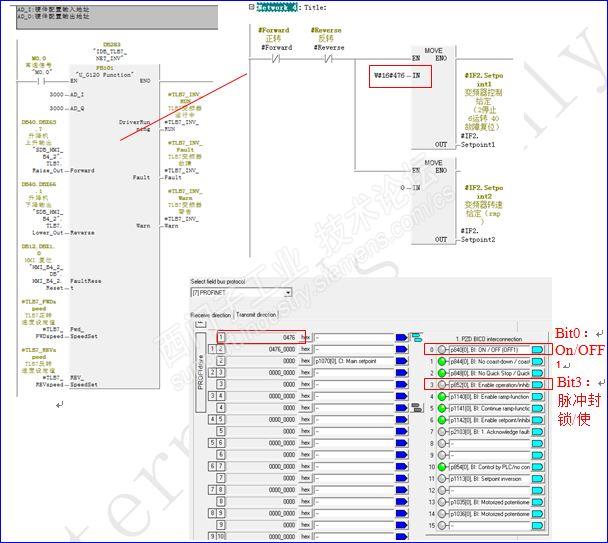
图14 PLC控制逻辑
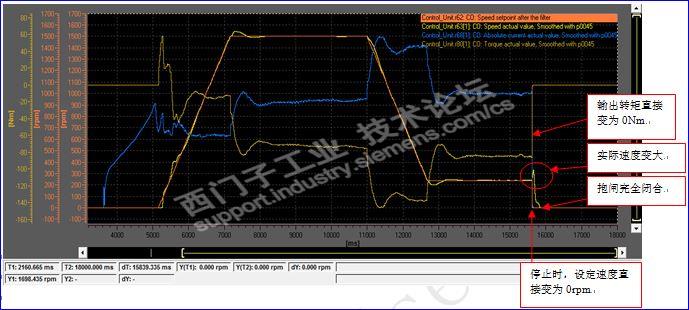
图15抱闸曲线
用户需要修改此段程序,将停止命令改为16#47E,再根据抱闸动作所需时间,修改抱闸控制逻辑。
5. 处理结果
Final Result
问题一:升降机下降无法快速停车,且变频器不报错问题已经通过测试1-7找到根源并解决。问题关键点是:
1)P219参数设置,该参数直接影响P1531,设置P219=25kw(P1531=-25kw)。
2)矢量控制方式下,变频器需要静态优化和动态优化。
3)P2106=2197.7,实际速度与设定速度偏差过大时,激活外部故障1(F7860)。
问题二:车盘下降到位时上下抖动问题已经通过测试8-10找到,需要用户修改停车方式,理清抱闸逻辑。问题关键点是:
1)升降机正常停止时,PLC不能给变频器脉冲封锁命令,会直接导致变频器没有转矩输出,相当于自由停车,在抱闸*抱紧之前,车盘必然会下滑。
2)抱闸动作时间与OFF1停车命令的配合逻辑需要用户自己理清。用户反馈:将变频器停止命令修改为16#047E,并使用G120的brake control抱闸控制点(变频器通讯状态字1 bit12)控制抱闸动作,车盘到位时不再抖动。
2017年5月,次接触西门子。听起来好笑,随便叫个人也会S7-200是吧。以前只是大概知道,从来没用过西门子产品,仿西门子的国内产品倒是摆弄过一次。因为给美国人做产品,所以一直用AB的PLC。结果去年开始要进军欧洲,欧洲客户的反映是他们习惯用西门子的产品。只好还是学了。
次就是从 S7-1200 + TP1200 Comfort开始的。从淘宝买来东西,接好线,开始学习,翻写之前的各种程序,研究西门子的*用法,还算顺利。零零散散用了3个月时间,个入门阶段算是过去了,工作的各种应用,都能实现了。有不少地方,因为博途的特点,学了一些新的考虑方式。我向来对HMI动画效果是隔外重视的,绝不屈就。所以又自学了用CorelDrawX7制作矢量图片。有了这个就不用受到Wincc的局限了。PLC和HMI的各种存储卡买了,也都玩一遍。



期间发现,西门子支持中心的应用范例,特别好,不仅可以学习如何具体应用,尤其西门子程序员的手法风格颇有启发。手册帮助这些东西是必看的,但都是比较基础的东西。
去年底偶然大家提起,以后有可能用伺服电机在我们的产品中,以前我没用过伺服。只好继续学习,选择了V90,看了一些手册和范例之后,在淘宝订货。



伺服驱动器和电缆先到的,伺服电机和滤波器还得等两月。我对屏蔽和接地的事情有点担忧,卧室里没有地线,就买了一捆6平方地线,从门口总闸盒跑两路地线到卧室。
卖我电缆的公司提供的电机动力电缆都是国内自己组装的,没有屏蔽层,只好买编织屏蔽套给电缆套上。编码器电缆还好是*有屏蔽。手头的网线都是普通的,就买来屏蔽6类网线和屏蔽水晶头,还有电源线都要是屏蔽的。还有双面导电的铜箔胶带。一样一样买吧,各种都得尝试。我是打算把手册中提到的和我知道的所有屏蔽和接地手段全都动手做一遍
看了EPOS的简单应用,还好不难。就等着电机来货上手调试了。
-------------------------------2018-02-07-----------------------------
在淘宝上买了个示波器,想看看EMI。
关于花钱的问题。只要行动,事情就简单了,花多了也就习惯了。而且这些器件都不白瞎,如果需要,都可以在工程用上。每个人都会受限于自己的资源平台约束。花钱提高效率,可以节约不少岁月的浪费,减少犹豫不决。随着年纪和经历的变化,如果自己不要求着,很多可能也就擦肩而过了。所以这些体现在琐碎细节中的日积月累的选择,造成的差别其实蛮大的。


----------------------------2018-04-09-----------------------------
今天供货商总算通知我伺服电机到货了,刚结了尾款。整整11个星期,德国订货,尼玛,都靠干了。一个星期后去美国,一去就是两个月,等回来再继续折腾了。订的是值编码器的小功率伺服电机,无抱闸,带键。还有个滤波器。


接好线,打开24DCV和220ACV电源,启动有一小会儿。打开V-Assistant,编码器自动识别,使能,点动正反转。还行,转得挺顺溜。集中看资料是2个月前了,还得重新看一遍。好在EPOS的控制界面并不复杂,编程不是大问题。至于电机本身的工艺应用,这个应该需要很多时间磨合,很多参数,各种负载情形,要用到得心应手,这才刚刚开始。
CPU
6ES7211-0AA23-0B0 CPU221 DC/DC/DC,6输入/4输出
6ES7211-0BA23-0B0 CPU221 继电器输出,6输入/4输出
6ES7212-1AB23-0B8 CPU222 DC/DC/DC,8输入/6输出
6ES7212-1BB23-0B8 CPU222 继电器输出,8输入/6输出
6ES7214-1AD23-0B8 CPU224 DC/DC/DC,14输入/10输出
6ES7214-1BD23-0B8 CPU224 继电器输出,14输入/10输出
6ES7214-2AD23-0B8 CPU224XP DC/DC/DC,14DI/10DO,2AI/1AO
6ES7214-2BD23-0B8 CPU224XP 继电器输出,14DI/10DO,2AI/1AO
6ES7216-2AD23-0B8 CPU226 DC/DC/DC,24输入/16输出
6ES7216-2BD23-0B8 CPU226 继电器输出,24输入/16输出
扩展模块
6ES7 221-1BH22-0A8 EM221 16入 24VDC,开关量
6ES7 221-1BF22-0A8 EM221 8入 24VDC,开关量
6ES7 221-1EF22-0A0 EM221 8入 120/230VAC,开关量
6ES7 222-1BF22-0A8 EM222 8出 24VDC,开关量
6ES7 222-1EF22-0A0 EM222 8出 120V/230VAC,0.5A 开关量
6ES7 222-1HF22-0A8 EM222 8出 继电器
6ES7 222-1BD22-0A0 EM222 4出 24VDC 固态-MOSFET
6ES7 222-1HD22-0A0 EM222 4出 继电器 干触点
6ES7 223-1BF22-0A8 EM223 4入/4出 24VDC,开关量
6ES7 223-1HF22-0A8 EM223 4入 24VDC/4出 继电器
6ES7 223-1BH22-0A8 EM223 8入/8出 24VDC,开关量
6ES7 223-1PH22-0A8 EM223 8入 24VDC/8出 继电器
6ES7 223-1BL22-0A8 EM223 16入/16出 24VDC,开关量
6ES7 223-1PL22-0A8 EM223 16入 24VDC/16出 继电器
6ES7 223-1BM22-0A8 EM223 32入/32出 24VDC,开关量
6ES7 223-1PM22-0A8 EM223 32入 24VDC/32出 继电器
6ES7 231-0HC22-0A8 EM231 4入*12位精度,模拟量
6ES7 231-7PB22-0A8 EM231 2入*热电阻,模拟量
6ES7 231-7PD22-0A8 EM231 4入*热电偶,模拟量
6ES7 232-0HB22-0A8 EM232 2出*12位精度,模拟量
6ES7 235-0KD22-0A8 EM235 4入/1出*12位精度,模拟量
6ES7 277-0AA22-0A0 EM277 PROFIBUS-DP接口模块
6GK7 243-2AX01-0A0 CP243-2 AS-i接口模块
6ES7 253-1AA22-0A0 EM253 位控模块
6ES7 241-1AA22-0A0 EM241 调制解调器模块
6GK7 243-1EX00-0E0 CP243-1工业以太网模块
6GK7 243-1GX00-0E0 CP243-1IT 工业以太网模块
