
气动机械手与人工智能
时间:2022-06-06 阅读:517
BionicSoftHand
气动机械手与人工智能
无论是抓、握还是旋转、触摸、敲击或者按压——日常生活中,我们都会用手完成这些各式各样的动作。人手是大自然真正的杰作——一种多么奇妙的工具。没有什么比在协作式工作空间中装入有仿生夹具、且可以通过人工智能学习来解决各种各样抓握和转动任务的机器人更便捷的了。
强化学习:奖励原则
BionicSoftHand使用强化学习法,即通过巩固强化进行学习。这意味着机械手将会习得一个目标,而不是一个必须模仿的具体行为。这需要它通过反复尝试(试错)实现。在所得反馈的基础上——无论积极还是消极的反馈——它不断优化行动,直到终成功完成任务。
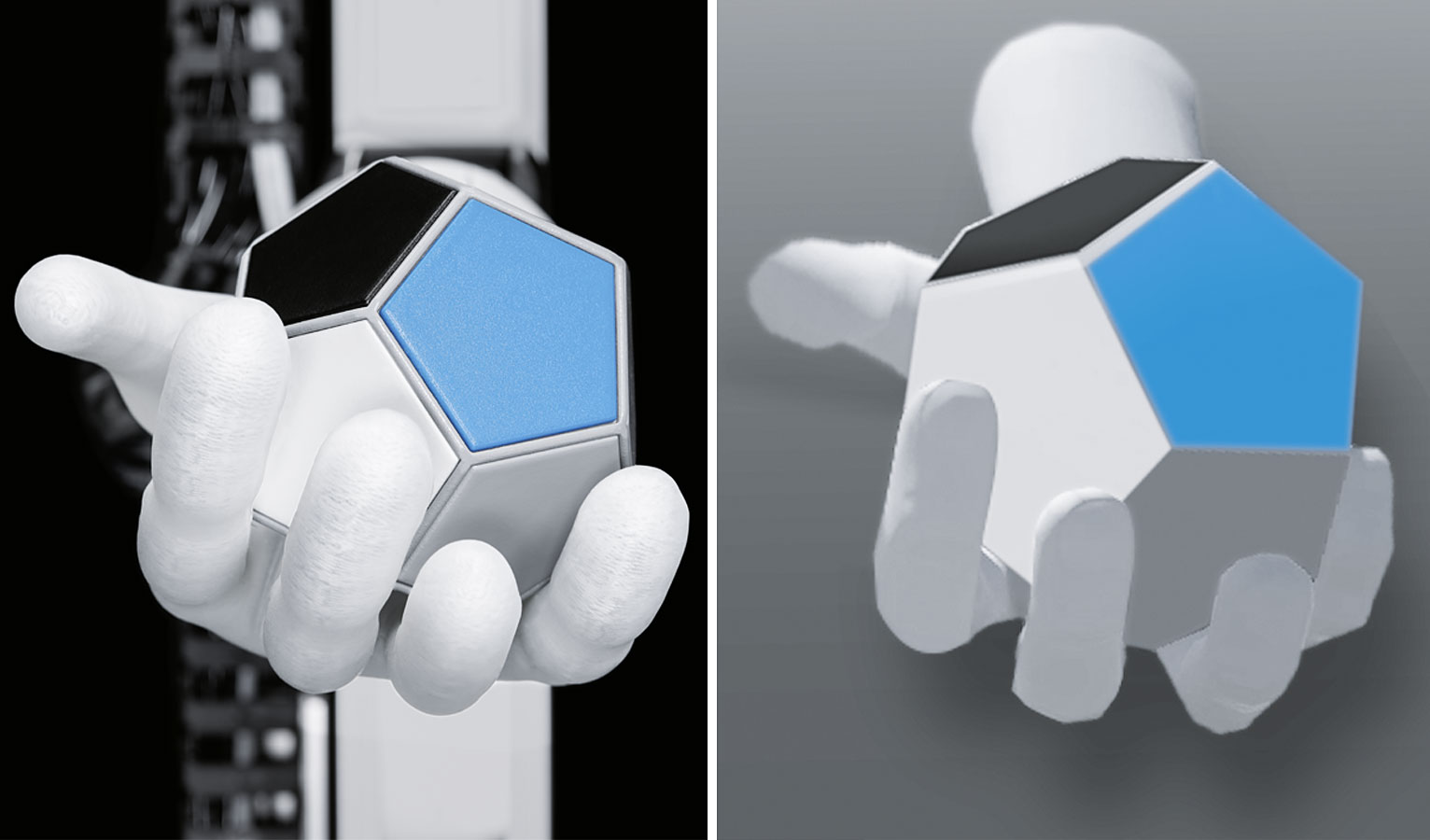
现实机械手的数字双胞胎
具体来说,BionicSoftHand应该转动一个十二面骰子,终使预先的一面向上。借助在虚拟环境中借助深度相机数据与人工智能算法创建的数字双胞胎,可以完成对必要行为策略的学习。
通过大规模并行学习快速传授知识
数字模拟模型,尤其是在将模型数量增倍时,可大大加快训练速度。在大规模并行学习中,所习得的知识将共享给所有虚拟机械手,然后在新的知识水平基础上继续工作——一个错误只犯一次。而成功的行动会立即被所有模型采纳。
模拟操控训练结束后,所习得的操控方法将被转移到现实的BionicSoftHand中。通过虚拟环境中习得的行为策略,机械手可将骰子转动至所需的一面,将来还可实现对其他物体的定向操作。通过这种方式将已习得的知识模块和新技能分享给其他机械手,实现全面信息覆盖。
气动运动学与3D织物
与人类的手不同,BionicSoftHand没有骨骼。它通过手指上的气动波纹管结构控制动作。当气室充满空气时,手指弯曲;气室排空时,手指呈伸展状态。拇指和食指中还装有旋转模型,使这两个手指可横向移动。通过这一设计,仿生机械手总共可实现12个自由度。
手指上的波纹管被一个特殊的3D纺织涂层包围,该涂层由有弹性且高强度的线编织而成。纺织涂层用于确定该构造扩展的位置与发力点、以及扩展受阻的位置。
压电式比例阀实现调控
为了大限度减低BionicSoftHand软管设计的复杂度,开发人员在手的正下方设计了一个小型数字化调控的阀岛。如此可不必通过牵拉整个机械臂完成对手指的操控。因此,BionicSoftHand的进气和排气各通过一根软管进行,可以快速、轻松连接并投入运行。使用的压电式比例阀可控制手指运动。
人机协作潜力
BionicSoftHand中灵活的气动运动学设计以及对弹性材料和轻型部件的运用使其不同于电动或电缆驱动的机械手,也使其生产成本降低。由于采用模块化设计,也可以更换使用三指或四指的夹具。
与气动轻型机器人(如 BionicCobot 或 BionicSoftArm)相结合,可实现直接且安全的人机协作。两台机器人均具有柔性,无需像传统工厂机器人那样与工人隔离。
因此,BionicSoftHand专为应用于未来工厂的协作式工作空间而设计。由于灵活的机械手可有力且灵敏地抓握,因此可以作为各类组装工作的“第三只”辅助手臂或用作服务机器人。