



欧姆龙/OMRON 品牌
代理商厂商性质
北京市所在地
欧姆龙LD移动搬运机器人AGV小车LD-60
移动机器人-LD 平台
| 外观 | 产品 类型 | 大 载荷 | 大 速度 | 配置和附件 | 型号 | |
|---|---|---|---|---|---|---|
 | LD-60 | 60kg | 1.8m/s | 标准套件 | ― | 37031-00000 |
| 充电桩套件 | 充电桩:12477-000 电池电源线(0.45m):12676-000L | 37031-00002 | ||||
| 启动套件 | 充电桩:12477-000 电池电源线(0.45m):12676-000L MobilePlanner地图规划软件:13495-200 操纵杆:13558-000 顶板:12944-000 | 37031-10004 | ||||
| LD-90 | 90kg | 1.35m/s | 标准套件 | ― | 37041-00000 | |
| 充电桩套件 | 充电桩:12477-000 电池电源线(0.45m):12676-000L | 37041-00002 | ||||
| 启动套件 | 充电桩:12477-000 电池电源线(0.45m):12676-000L MobilePlanner地图规划软件:13495-200 操纵杆:13558-000 顶板:12944-000 | 37041-10004 | ||||
软件/控制器
| 外观 | 产品名称 | 配置和附件 | 型号 |
|---|---|---|---|
 | 地图规划软件 | 安装程序(USB)* 许可证加密 | 13495-200 |
 | 调度管理控制器 1100 EnterpriseManger | 机架滑动安装工具 AC电源线(2.5m) | 11167-100 |
新版本请咨询本公司销售人员。
选配件
| 外观 | 产品名称 | 规格说明 | 配置和附件 | 型号 |
|---|---|---|---|---|
 | 高精度定位系统 | 双传感器 | 2 个传感器,2 个安装支架,1 个电源连接器, 2 个 RS-232 连接器, 宽度为 25 毫米的磁带(南极朝上)。50 米/卷 | 13660-000 |
| 磁条 | 宽度为25毫米的磁带(南极朝上)。50米/卷 | 14925-000 | ||
 | Acuity 定位器 | - | 摄像头,安装套件,电缆(2m),水平校验套件 | 13700-000 |
 | 触摸屏 | - | 带支架的触摸屏,带支架的电源, 从核心控制器到电源的电源线(长度为33厘米), 从电源到触摸屏的电源线(长度为183厘米), 触摸屏与核心控制器之间的以太网网线 (长度为153厘米), 触摸屏与AIV安装表面之间的垫片, 软件包(包括触摸屏支持软件) | 13605-000 |
 | 侧面激光器 | 标准套件 | 2个激光器, 1条电缆(2m)(连接2个激光器的Y形电缆) | 13456-000 |
| 启动套件 | 2个激光器, 1条电缆(2m)(连接2个激光器的Y形电缆), 2套安装套支架,2个金属盖 | 13456-100 | ||
 | 呼叫器 | WiFi有线 | 呼叫/门盒(2.8m),转换适配器 | 13029-902 |
配件
| 外观 | 产品名称 | 规格说明 | 配置和附件 | 型号 |
|---|---|---|---|---|
 | 电池 | - | - | 18578-000 |
 | 充电桩 | - | 交流电源线(2.5m) | 12477-000 |
| 扩展壁架 | 交流电源线(2.5m), 扩展壁架 (用于推车运输装置) | 12477-050 | ||
 | 操纵杆 | 电缆长 0.6m~3m | - | 13558-000 |
| - | 分接电缆 | - | DB44HD 分接电缆(0.76m) (用于数字I/O接口的D-SUB44针电缆(0.76m)) | 14165-000 |
| - | 顶板 | OEM 型号的顶盖 | - | 12944-000 |
| - | 电池电源线 | 电缆长 0.45m | - | 12676-000L |
欧姆龙LD移动搬运机器人AGV小车LD-60
AGV主要用于工厂和仓库中的物料搬运。它们相比人工驾驶搬运车辆更加安全,相比固定式自动化更灵活等特点。
AGV车辆的种类及应用范围
自动导引车辆AGV有着各种各样的车辆形态。有的基于常见的叉车,有些则根据具体应用场景定制的特种车辆。近年来,随着应用场景在各行业的不断扩展,出现了更多形态的搬运车辆和移动机器人。

在汽车行业、家装行业、物流中心、电子产品制造、食品饮料、造纸印刷,甚至钢铁及重型制造都有AGV的成功应用案例。一些医院也开始引入AGV来做一些简单的搬运,从而释放出更多的人力来照顾病人。此外,AGV也适合应用在劳动密集型产业,特别是在有潜在危险或有害人身健康的环境下作业的场景。
车辆行驶控制尽在掌握
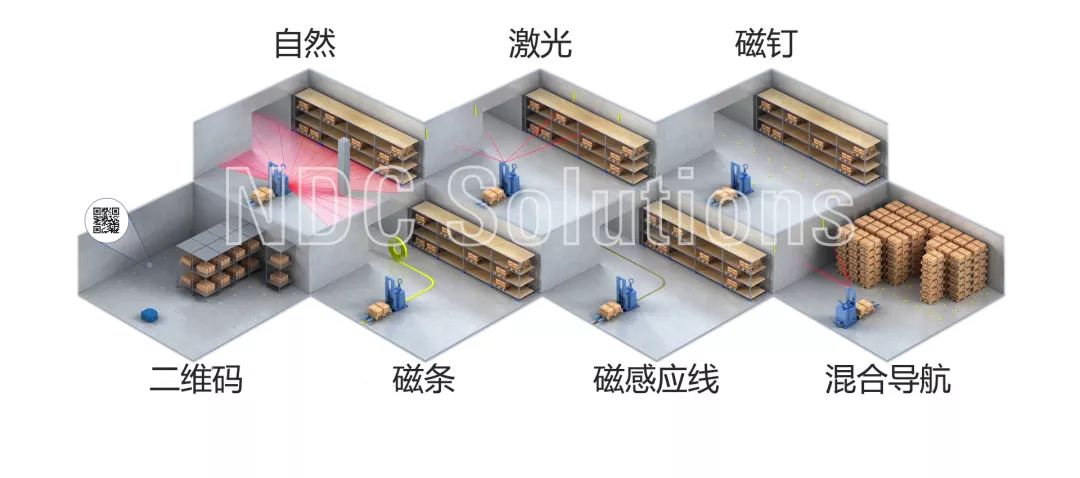
目前有两种主流的方式来进行车辆导航:
1. 通过安装磁点、磁导线、二维码来设定物理导航路径;
2. 通过激光雷达和场景中的物体进行定位导航。
车辆通过相关传感器定位,按照设定的路线行驶。路径选择由电脑软件进行控制,之后通过上层开发集成到工厂的仓库管理和企业系统中。
AGV的精确控制有助于提高工厂和仓库的效率,安全性和质量。也会积累更多数据便于分析,基于数据分析从而改进流程,进而可以降低质量问题。电脑设定的安全区域会进一步降低了货物、托盘和货架损坏的风险。 重要的是AGV行驶的可控性能大限度地降低员工受伤的风险。



