




欧姆龙/OMRON 品牌
代理商厂商性质
北京市所在地
简单!
调整更简单
利用实时自动调谐设定良好增益
搭载了实时自动调谐功能,可实时推算设备的负载,根据其结果自动设定良好增益,调整变得更简单。

选择良好电机
可应对各种用途的丰富品种
电机容量丰富,可以应对各种应用。可以根据客户用途来选择良好电机。
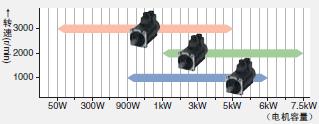
*仅7.5kW时,额定转速为1,500r/min。
减小控制柜的设置空间
伺服驱动器小型化
伺服驱动器的设置面积与本公司以往产品相比削减了32%,更有利于控制柜的小型化。

高性能!
缩短间歇时间
大幅度提高速度响应频率
速度响应频率比本公司以往产品提高了2.5倍,以求做到进一步缩短调整时间,实现机器的高速、高响应化。

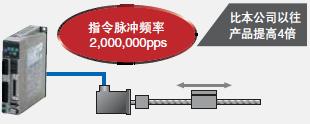
缩短间歇时间
提高指令脉冲频率来高速定位
指令脉冲频率比本公司以往产品提高了4倍,因此可以实现高速、高精度控制。
提高加工精度
搭载了全容量17位的编码器*1,所以高精度
是本公司以往产品*2的2倍精度,从而实现了亚微米高精度定位控制,同时还实现了低速领域下的稳定控制。

*1 带值编码器的伺服电机。
*2与本公司以往机型相比。(750W以下带值编码器的伺服电机)
功能强大!
降低机械振动
通过适应滤波器快速抑制振动
即使共振频率发生变化也能实时自动追踪,可以降低传送带等刚性较低的机械振动。

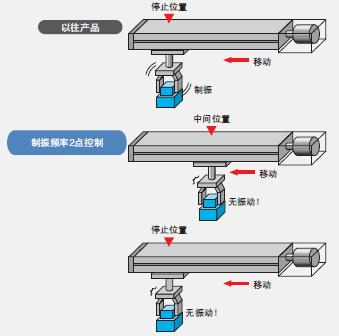
缩短间歇时间
通过制振控制功能降低机械振动
通过去除停止位置和中间位置的振动频率成分,来抑制刚性较低的机械振动。(制振频率2点控制)
Smartstep A系列和Smartstep Z系列伺服驱动器接收脉冲信号;
R88D-WT系列的伺服即可以接收脉冲信号也可接收-10~10V的模拟量信号。
R88D-U系列伺服驱动器接收脉冲信号。
R88D-UA系列伺服驱动器接收-10~10V的模拟量信号。
R88M-G05030H R88M-G05030H-S2
R88M-G10030L R88M-G10030L-S2
R88M-G20030L R88M-G20030L-S2
R88M-G40030L R88M-G40030L-S2
R88M-G05030H R88M-G05030H-S2
R88M-G10030H R88M-G10030H-S2
R88M-G20030H R88M-G20030H-S2
R88M-G40030H R88M-G40030H-S2
R88M-G75030H R88M-G75030H-S2
R88M-G05030H-B R88M-G05030H-BS2
R88M-G10030L-B R88M-G10030L-BS2
R88M-G20030L-B R88M-G20030L-BS2
R88M-G40030L-B R88M-G40030L-BS2
R88M-G05030H-B R88M-G05030H-BS2
R88M-G10030H-B R88M-G10030H-BS2
R88M-G20030H-B R88M-G20030H-BS2
R88M-G40030H-B R88M-G40030H-BS2
R88M-G75030H-B R88M-G75030H-BS2
伺服驱动器原理如下图所示,速度指令和速度反馈信号在速度控制器的输入端进行比较,速度控制器输出电流指令信号,其表征是直流量,因电机为交流电机,因此必须把该直流量交流化,同时使该交流指令的相位由转子磁极位置决定。电流指令频率由转子磁极的旋转速度决定并把电流指令矢量与磁极产生的磁通相正交的空间位置上,为此,将位置检测器输出的磁极位置信号,在乘法器中与直流电流指令值相乘,从而在乘法器的输出端可获得交流指令信号,交流指令信号与电流反馈信号相比较后,差值送入电流控制器,依靠电流控制回路高速跟踪能力,使电机定子电枢绕组中产生出波形与交流电流指令相似的正弦电流,该电流与永磁体相互作用产生电磁转矩,推动电机运动。
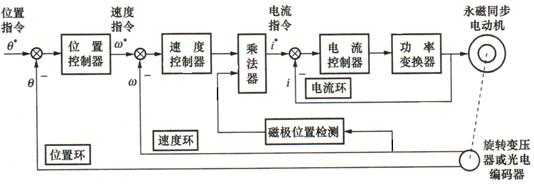
伺服驱动器工作原理示意图
功率变换器主要由整流器和逆变器两部分组成。整流器将输入的三相交流电整流成直流电,经过电容器滤波平滑后提供给逆变器作为它的直流输入电压,逆变器的作用似在脉宽调制控制信号的驱动下,将输入的直流电变成电压与频率可调的交流电,输入到伺服电机的电枢绕组中。脉宽调制回路以一定的频率产生出触发功率器件的控制信号,使功率逆变器的输出频率和电压保持协调关系,并使流入电枢绕组中的交流电流保持良好的正弦性。
